- Home
- 一覧
-
[自作マウス]op18kv2 mod①FDMで様子見てみる
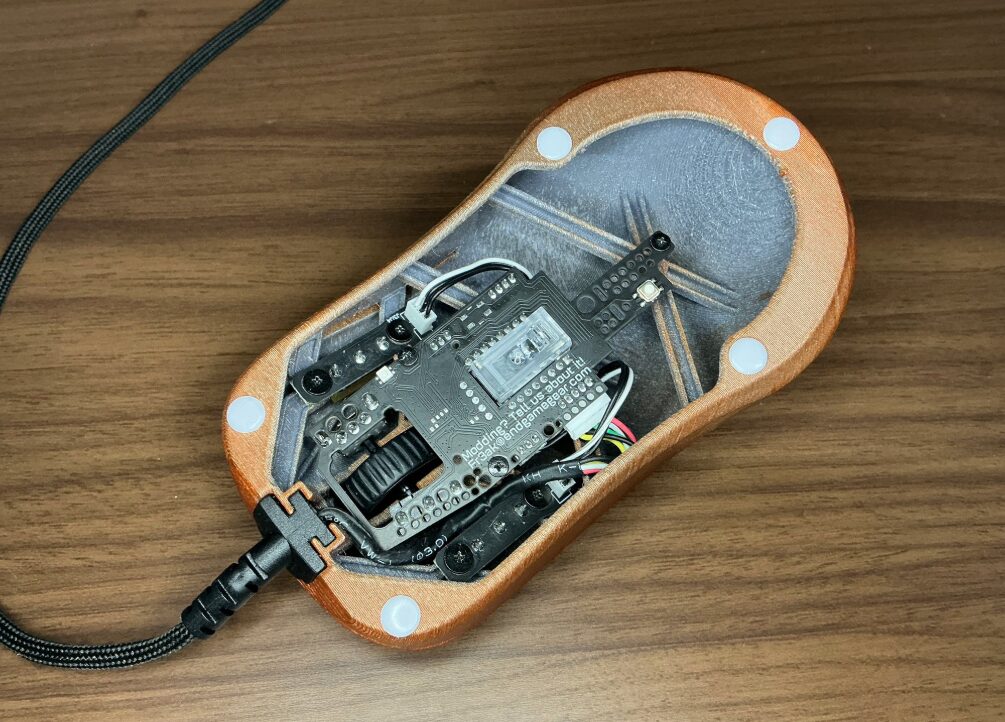
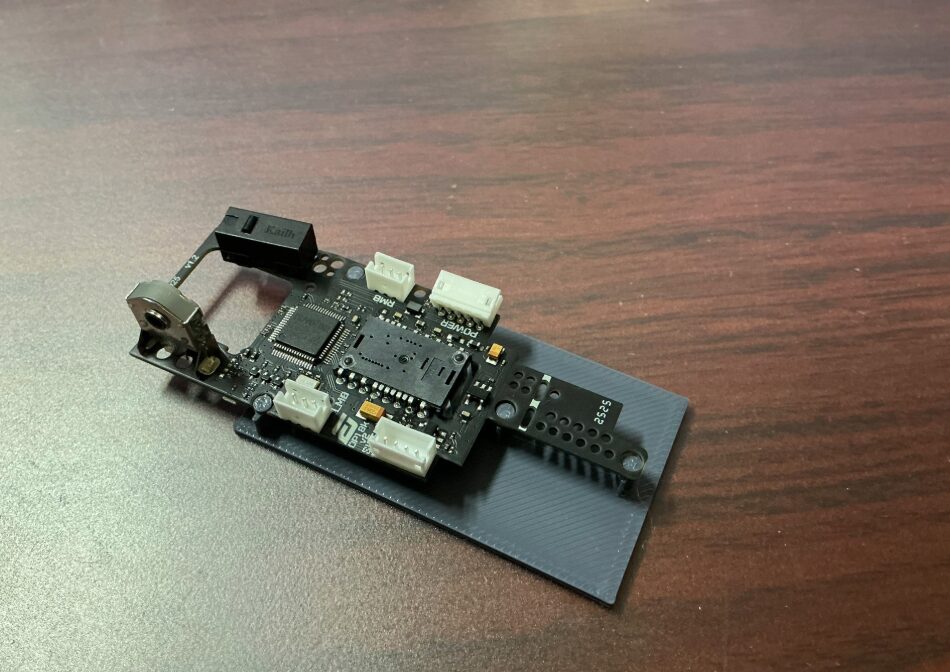
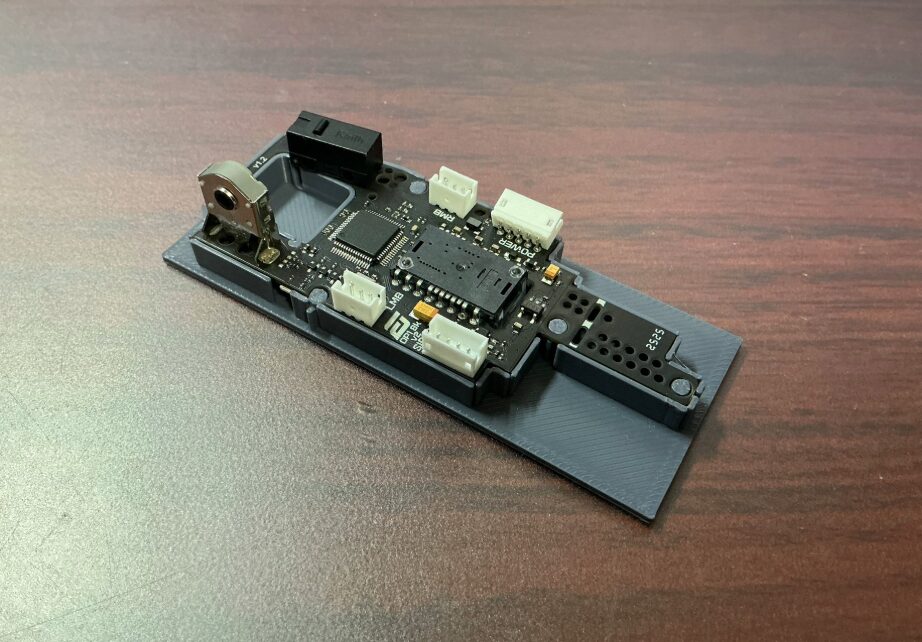
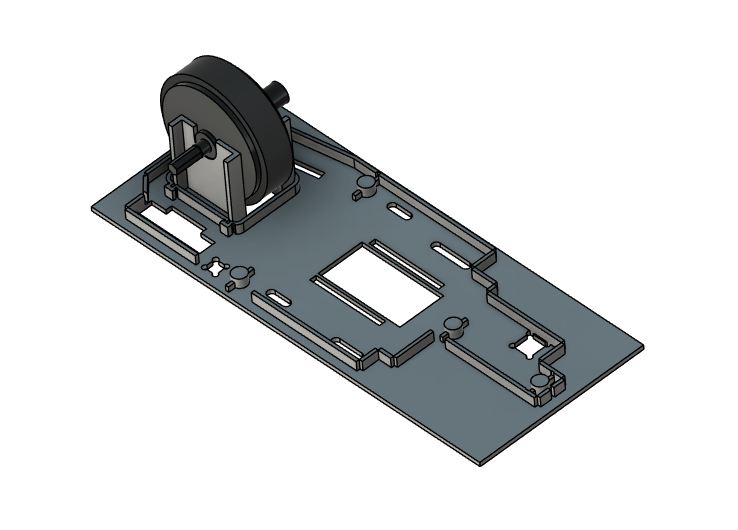
endgame gear op1 8k v2 の基板をモデリングしたのでシェルを検討する。
MJF PA12は高いし時間かかるしばらつきの方向毎回変わるので、FDMでBambu Lab A1 miniにお任せする方針です。A1mini強い
最初にFDMの厚み感とかどんなもんだったかなとモデリングして印刷したものです。
積層方向を意識して、サポートが少なく、綺麗に、造形できるように意識してモデリングするべきだと思うのですけど、A1miniってホント何なんでしょうね。データ突っ込んで角度付けてスライスボタン押すだけで、勝手にツリーサポート引いて、真横の壁もきれいに造形できちゃうんだよなあ、、、
今どきのFDMだと積層とか意識せずモデリングしても何も問題ないのであるな。

Bambu Lab A1 miniモデリング
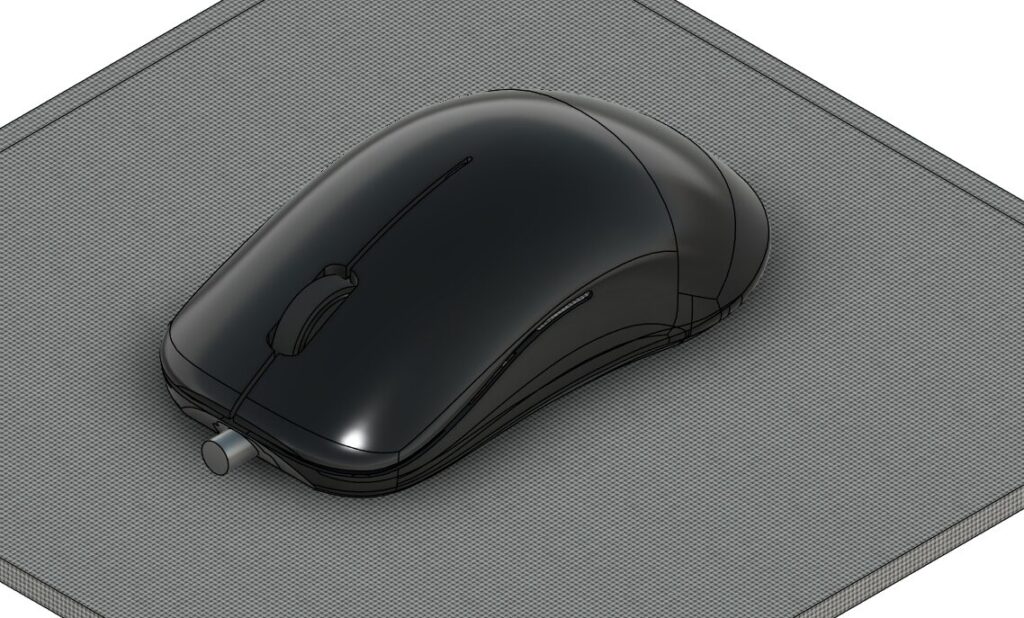
形状は例のごとくkinzuっぽいのを使います。
そこにあったから、小さくてこれに入れば大体入る、神形状と信じている構成としては1pcsのシェルを目指します。特に理由はなく何も考えていない。
MBは一体型、しかもsensei形状で丸い背なので、クリック感は限界が早そう。曲がる軸が真っすぐでないのが一体型はゴミ。
サイドボタンは無し。小さいので場所がない、載せても親指にもろ干渉する、そもそも自分がingameで使わない。方針としてはできるだけサポートレスで作れるようにしたいです。マウスの背尻を下に傾けて印刷想定で
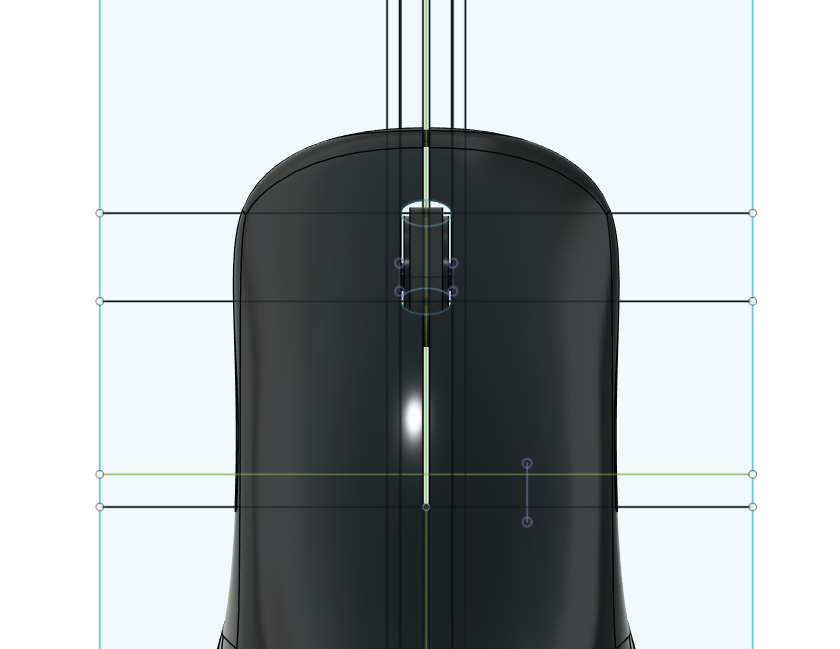
cadはfusion使います。厚みは上側は1.2mm,下側は1.5mmとしました。意味のある数字ではないですが底が厚ければ何となくよさそう。MJFだと1.5mmで閉じていてよさげという感じだったのでPLAならもうちょい薄くてもよさそうだなと。
結果1.2mmで全然いいんじゃないかと思いました。
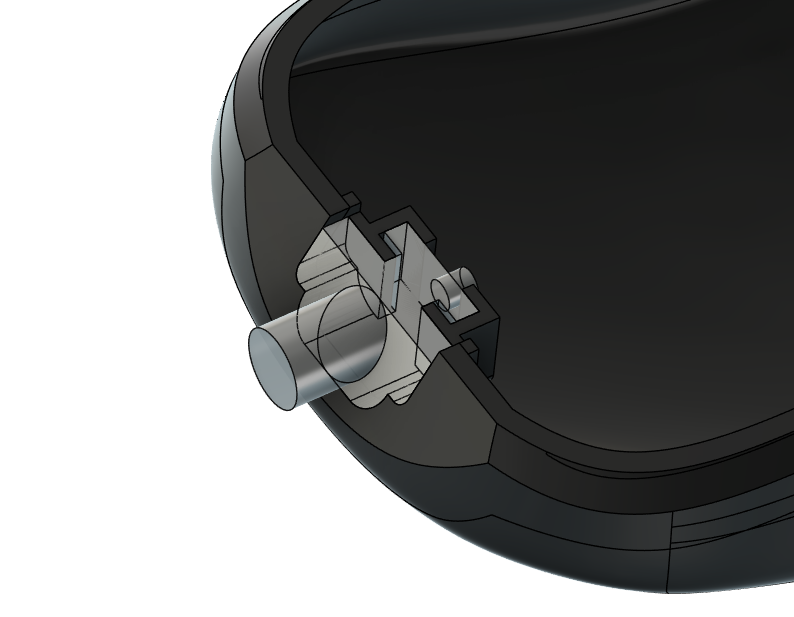
ブッシュ周りを作成。1.2mm厚で嵌まるように壁を作成しました。シェルの先端は使いやすいようにブッシュと面一でカットしてしまいました。
ソール周りを作成。φ8mmのソールが張れるようにしました。厚みは2mmとって、そこそこ硬めにできていると思います。外形は45度にして見栄えと印刷しやすい感じにしています。

MB周りをカット。側面のカットはproxタイプでなく横から入れるfinalmouseタイプにします。一体型だとこっちのが見栄えよさそう?楽に切りたいので正面と側面とから1回ずつ切る感じにしています。
サイド端の曲線は側面から刃を入れる時に綺麗になるよう、水平な線にしています。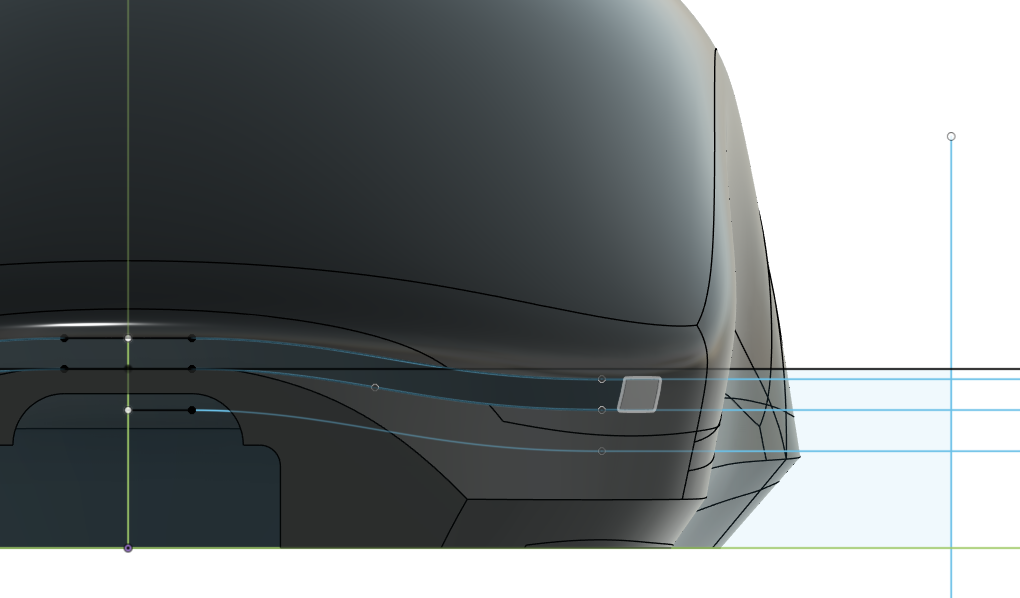
先端の背が低くて、ブッシュパーツと干渉しそうです。なので下の切り取り線の中央部はブッシュパーツと面一になるようにしました。
これより先端低いマウスだと難が出ますというかこれももう少し切り取り線下げたかったです。
op18kv2純正のブッシュはでかすぎるので、使わない方向性でやる方が小型マウスはモデリングしやすいかもしれない。このでかいブッシュを差し込めばブッシュ周りの補強になるのが偉いところではありますがでかすぎる、、
側面もMB周りの切り取り線をスプラインで引きました。端っこを水平にしていたので、そこを始点にしてオフセットすれば正面の切り取りと合います。
水平カットしている角っこがべったとした印象にはなるのですけど、切り取るのにこれが雑で簡単かなと今は思っています。
1.5mm幅切り取っていますが根元のところは沈みませんから、細くしていくようにしてもいいのかもしれない。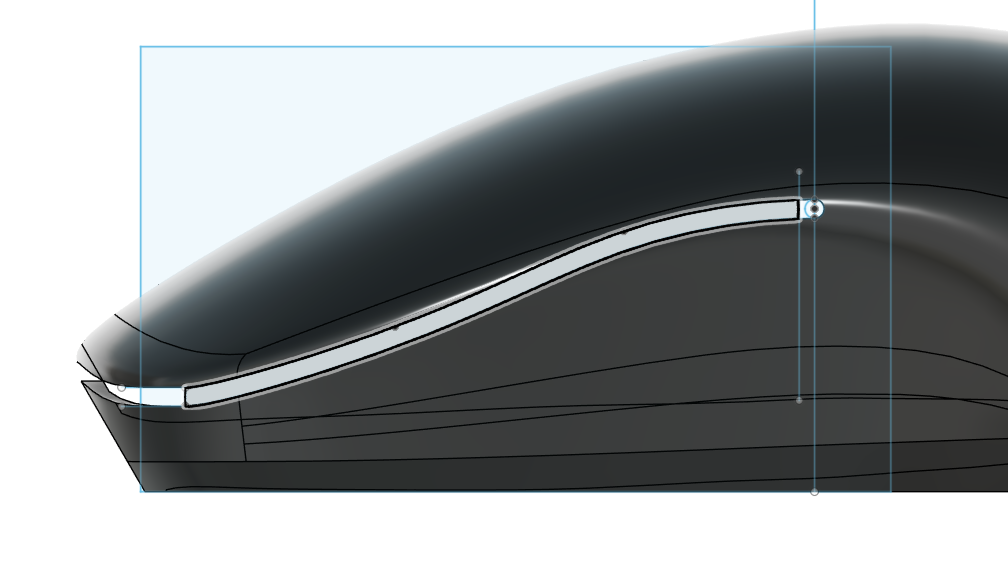
中央もホイールをよけながら分割しました。これは鉛直に切り取りましたが、ホイール周りはホイールからオフセットして内側から切り取ったほうがいいのか、悩みます。
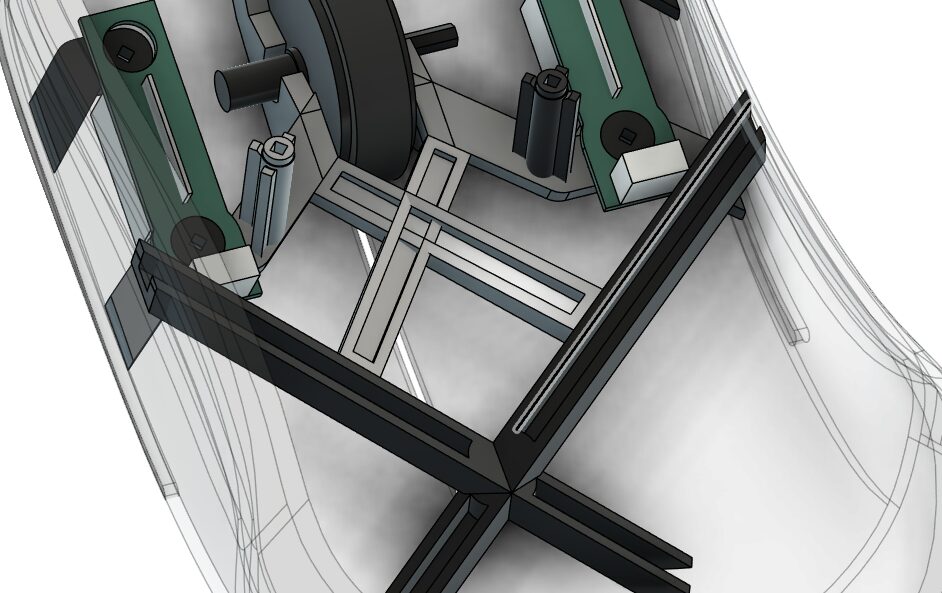
後方のメイン基板ねじ止め部を作成しました。基板のしっぽの部分は使わない方が多いと思うのですが、サポート無しで印刷するため壁を斜めにかけようとするとzhコネクタケーブルがあるためめんどくさくて、こっち使えばいいやという感じです。
別件でtokiryoさんに教えてもらい気づきましたがv1はそもそもしっぽついてないみたいだし。4mm四方の棒を1mm厚でシェルしたもので筋交いしています。何パターンか試して、強度的によさげなところでした。
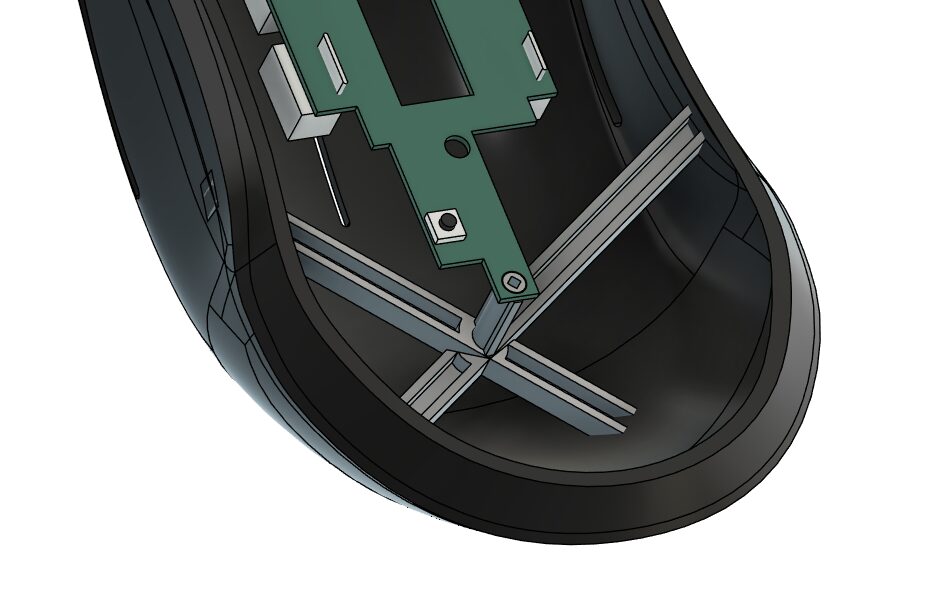
中央当たりにも補強で同様に入れています。斜めに壁を立てるだけではだめで、やはり交差して筋交いさせるのが強度的に大事そうかなと感じました。
その時は色々つぎはぎしていたのであれですが、ここから真っすぐ中央寄りのネジ穴に通せばよかったかもしれないです。後方は補強なくてもソール部あるのと曲率大きくて大丈夫ですしね。
メインスイッチ周りを作成します。これも印刷方向を考えて、斜めに作りたかったのですが、マイクロスイッチが邪魔で、一段出来ています。
後方は解消できそうですが、すると本体との接続部の高さが合わず面倒だなとなったので
先方はそのままマウス先端に突っ込ませました。後方はホイール周りに接続させようと思います。
メイン基板のねじ止め部も生やして接続しておきます。

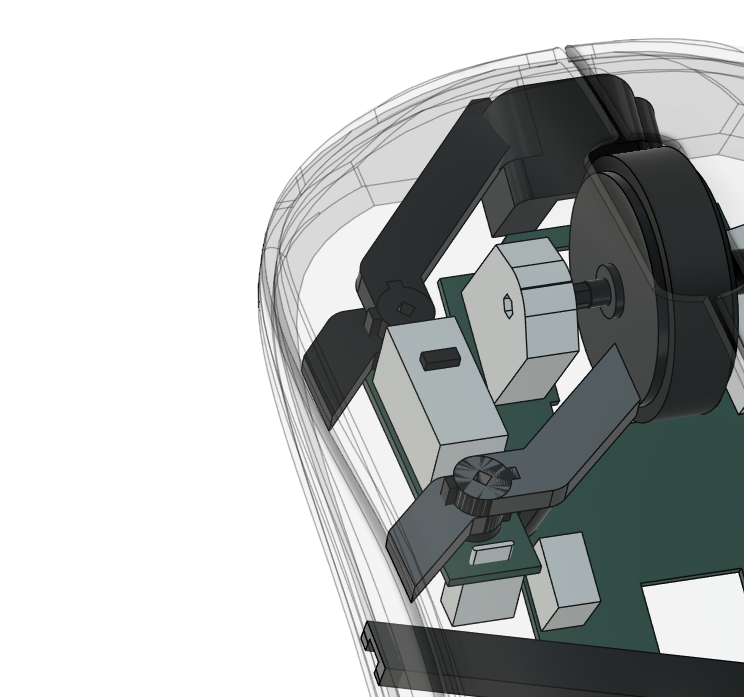
ホイール周りを作成します。ブッシュパーツとメインスイッチ周りとに接続するようにしています。
これだと当然ホイール後方が弱くなってしまったので、こちらも筋交いを入れ補強部と接続しました。
メインスイッチ周りとシェル側面の接続が不連続だったのでフィレットして滑らかに接続させました。

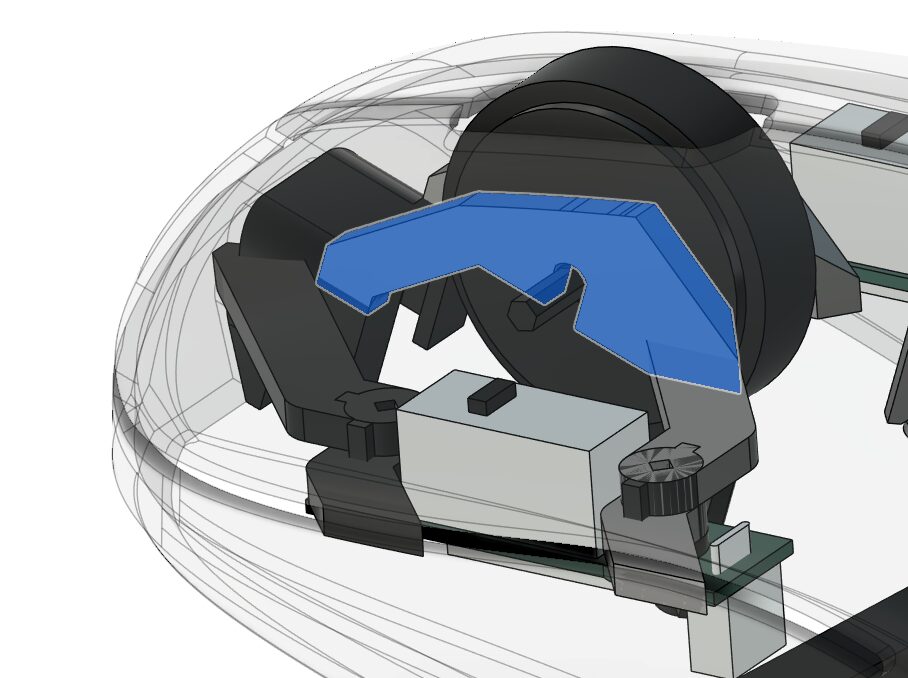
MBの根元を薄くして、ヒンジを作成します。6mm幅で掘っていますが、これくらいがちょうどいいかなと思いました。
厚みについてはA1miniのスライサーが勝手に2層分にしてくれるので、その厚みに強制的になります。
MB部も厚み1.2mmだと当然ふにゃふにゃでクリックできないです。これでは純正kinzuと一緒ではないか。+1.3mm厚の補強をしています。2.5mm厚のシェルを作って鉛直に抜いています。
どれくらいの厚みでどの程度補強入れるのが適切かはわかりませんがいい感じな気はします。
メインスイッチ周りがサポート必要になってしまったのですが、ツリーサポート生やされても邪魔なので、自前で立てることにしました。なんかこう、雑に

全体的にフィレット掛けたり嵌め合いようにオフセット入れて完成です

印刷
右下に出ている修復を押さないとスライス後にデータが一部消えるので注意する。見逃して何度かやらかした
130度傾けて印刷するようにしていました。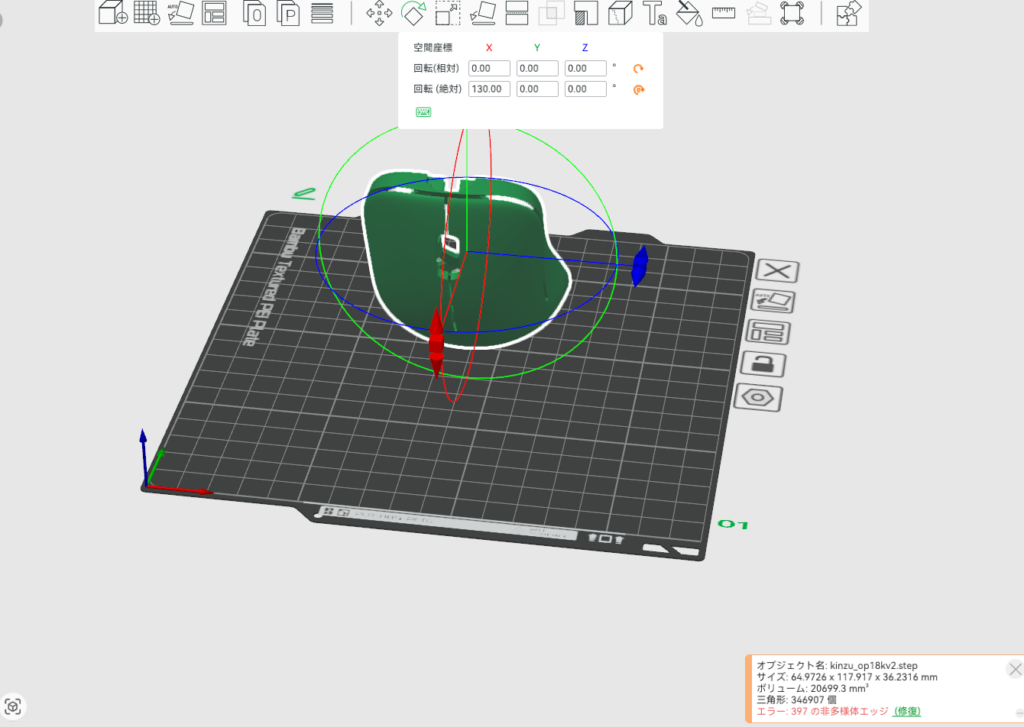
これが箱出しででてくるa1miniやべえよなあ。bambu以前だと3dpのオタクにならないと使いこなせなかったのが品質に詰められる部分があるとはいえ今は何もせず失敗無しだもんなあ。
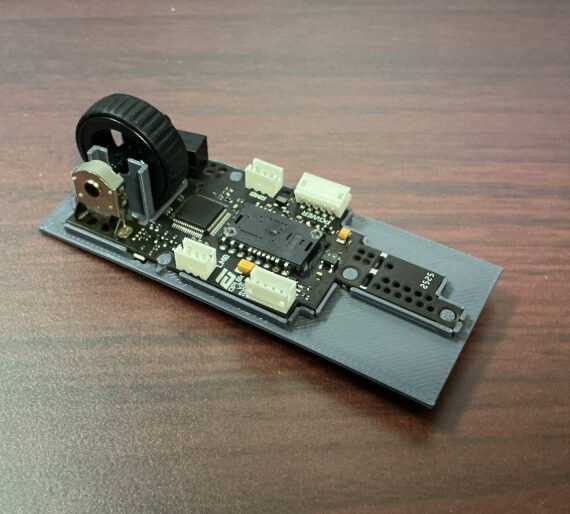
印刷ボタン押して2時間後。

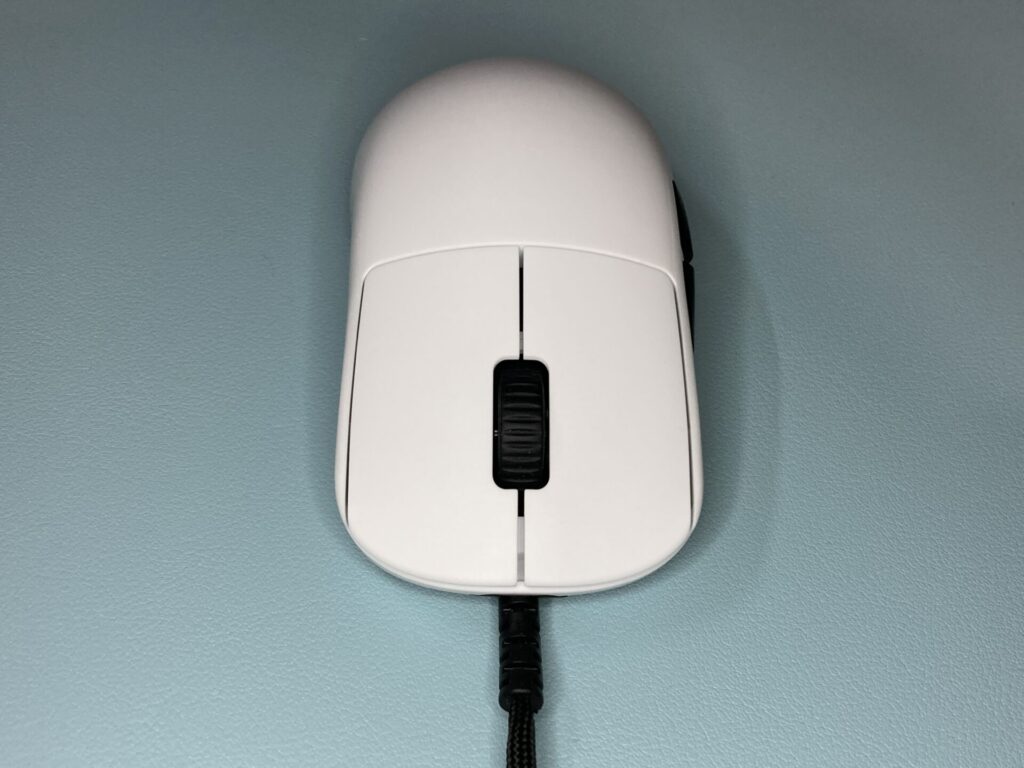
どうせグリップテープ貼るので、底の積層痕荒い尻の部分だけアイロンで均すだけでも全然いいのですけどどうせなのできれいにしようかなと。
荒いところや造形のずれている部分をuvレジンとやすりとサフとで整えてみました。

ラッカースプレーぶっかけました。なんかオレンジのしかなかったので、透けてますね。
フィラメントの色とか塗装の色とかちゃんと選べばイイ感じになりそうな気がします。裸で使うならPLAのつるつる感はちょっと微妙なのでこっちのがいいかしら
ソールもPLAだと剥がれがちなのでこのほうがいいかしら
おわり
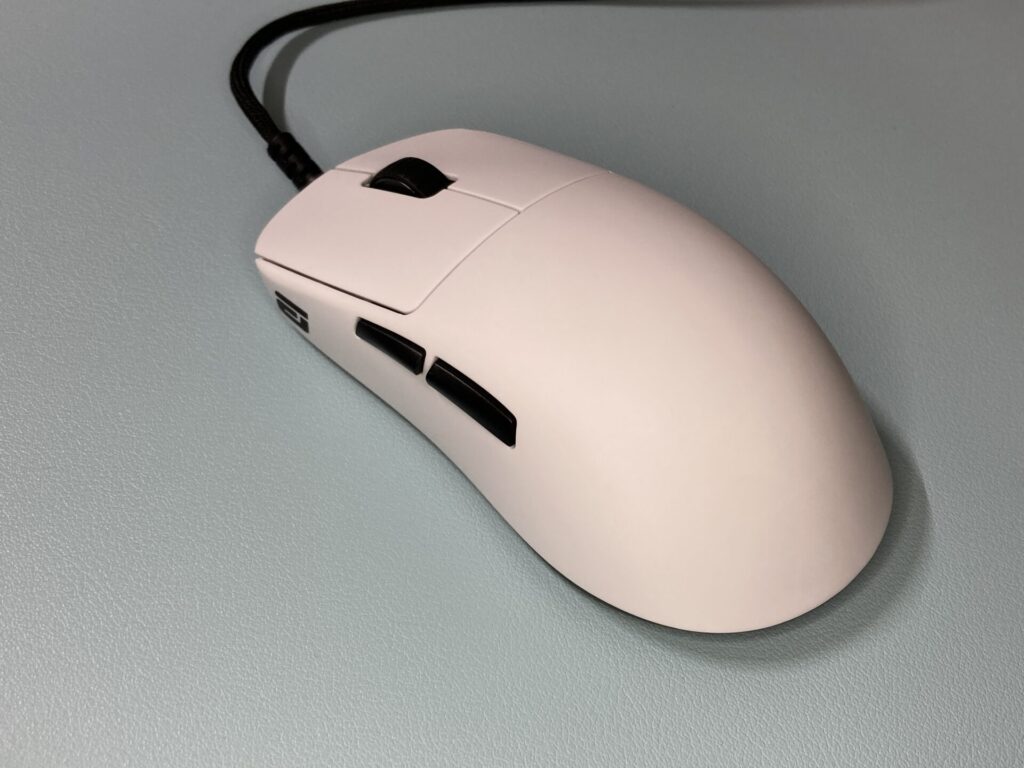
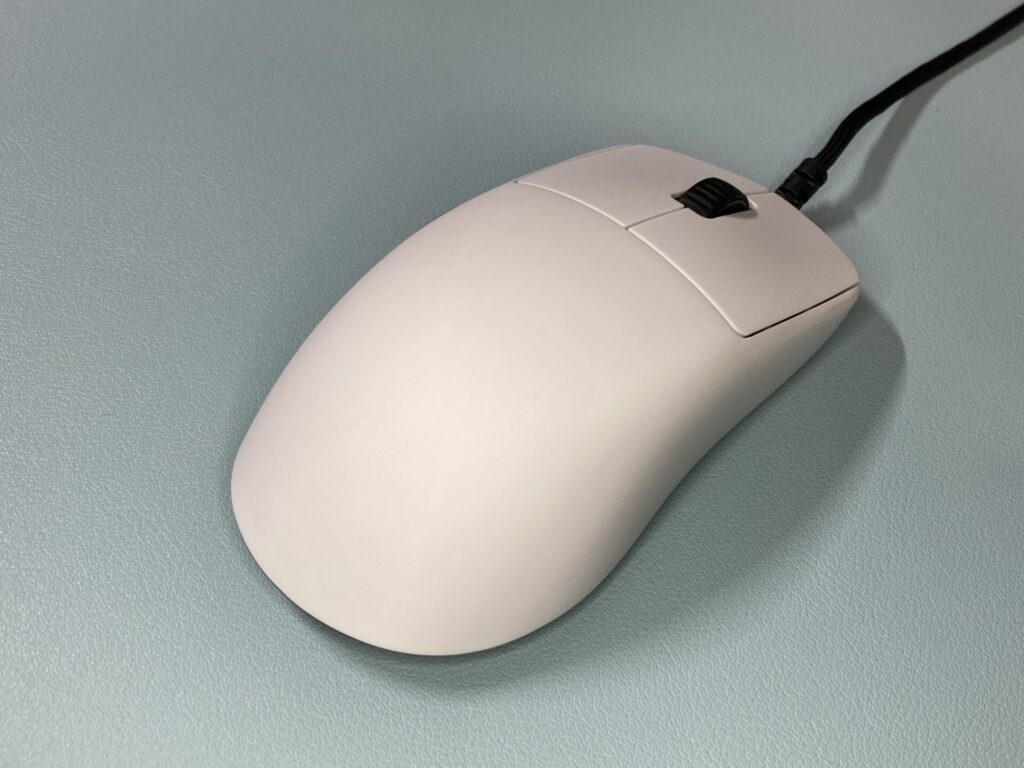
使用感としては、まあ実用はできるかなという感じです。ちょこちょこブラッシュアップと微調整は必要だけどキリもない。
重さは37gで、背が低い都合上やや基板前目に配置したので重心がoptical centerではあるのですが使うとフロントです。これ系の宿命ではあると思うのですが前に寄っちゃいますね。
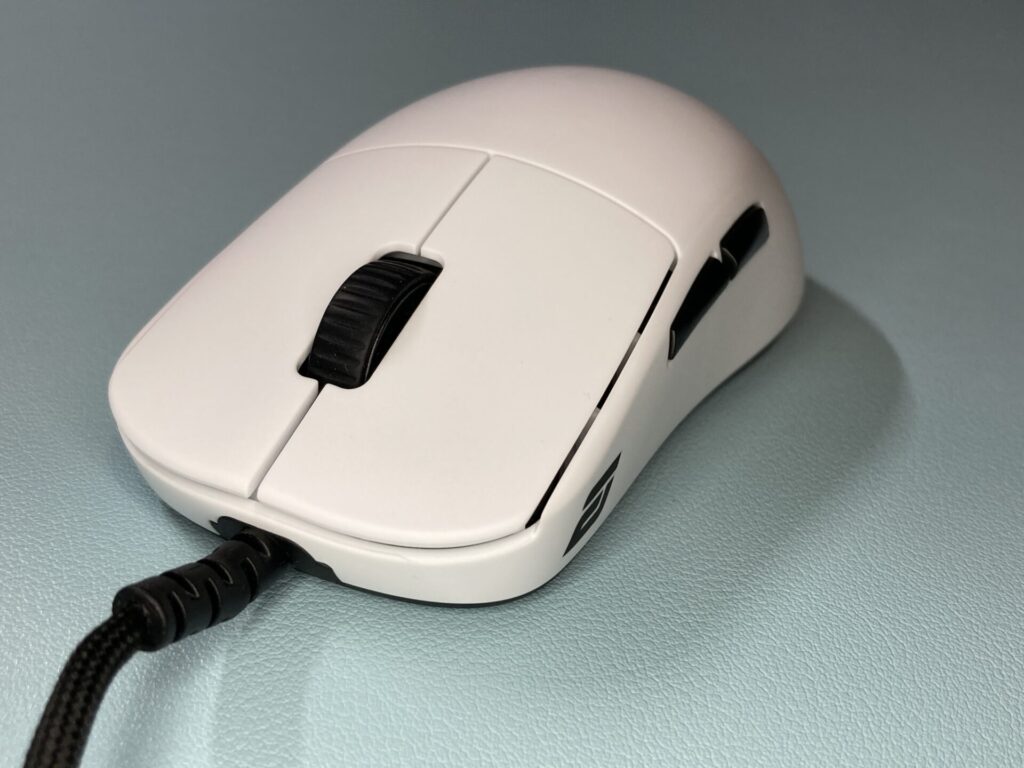
クリック感はまあ悪くない、微調整振るのも大変なのでそのうち黄金比を見つけたい。粘りと詰まりが一体型らしくありますがkinzuの外形上どうにもならなそう。するとセパレートだなと思ってしまいますね。別に一体型にこだわりがあるわけではないのですけれど。ホイール低い問題。高くするには大きいホイールを作ることですがそれだけだと、結局基板に当たるのでちょっとしか大きくできないです。で、ホイール自体ジャンパして別基板にしようと思います。proxみたいなイメージ。これだとフロント重心問題も多少良くなります。
その上でホイールも自作して、サイズも高さも可変にしたいですね。とりあえず折れない軸作ろうかなあ別基板の話だとメインクリックも別基板を起こしたいです。gxスイッチしか使えないので。でホットスワップにしようと思っても純正のスイッチパック売ってないのですよね。なのでホットスワップとかの互換基板作りたい。で、今回マイクロスイッチが邪魔でサポート必要だったので、スイッチとねじ穴の間隔を広げたパターンも作りたいですよね。
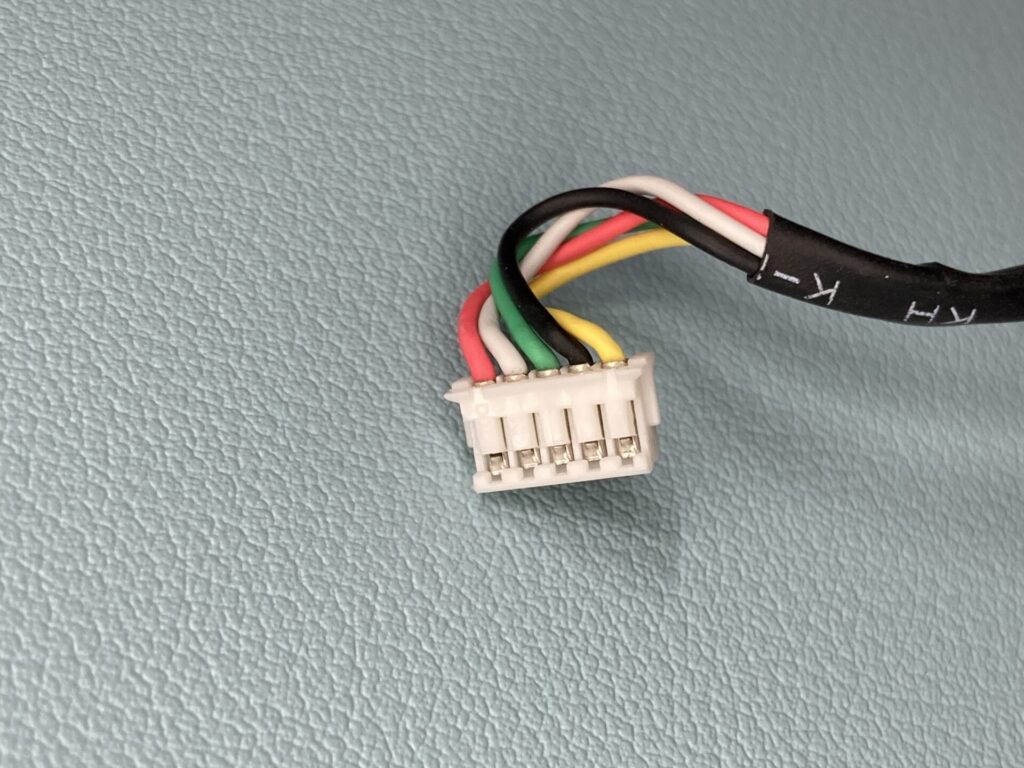
ブッシュでかくて小型マウス作れない問題。別基板の話でも必要ですが、zhコネクタ周り買って、op18kv2用のケーブル作ってみました。AWG32の線材で普通に作りやすかったです。AWG36もやってみたのですが、細用のコンタクトが流通してないみたいで、普通のコンタクトだと噛まなくて駄目でした。純正じゃなくて中華のzhコネクタパック買って使ったのですがそれもよくなかったかな。
自作ケーブルに対応させたらさせたで純正が使えなくなってしまうという話はあるのだが
圧着工具はiwissの3220mというやつを買ってみました。2か所一気に圧着できるのはいいのですが、どこまで突っ込んだのか見えないのがちょっと難点に思いました。圧着自体は普通にできました。

アイウィス(IWISS) JSTコネクタ用圧着ペンチ ラチェット式 オープンバレル 0.03-0.5mm2 極小端子対応 IWS-3220Mシェルとしてはこの構造で他の形状を色々作ってみてもいいし、Mbセパレートにしたりボトムシェル追加したりしてもいいのですがどうしようかしら
とはいえメインスイッチ基板が分離している以上は、トップシェルに固定する以外の選択肢はないですよね。ボトムシェルの留め具合でクリック感変わるのは終わっているので。kpuとかza13とかで地獄を見ました。
どちらにせよホイール低いと駄目なので分離基板作るところからですね。今回はサイドボタン付けなかったですが、つまみ持ちならなおのこと使わないのでサイドボタンはサイドよりもトップとかにつけた方が有用なのですよね。
まだまだop18kv2が味しそうです。巷ではten airとかもよさげですが、無線なのでどうかなあというところもあり。でも値段変わんねえんだよな!op18kv2たけえ
ひとまずfdmでop18kv2 mod触ってみたということで。つぎはぎのめちゃくちゃデータ置いておきます。
-
[自作マウス]op1 8k v2 基板採寸
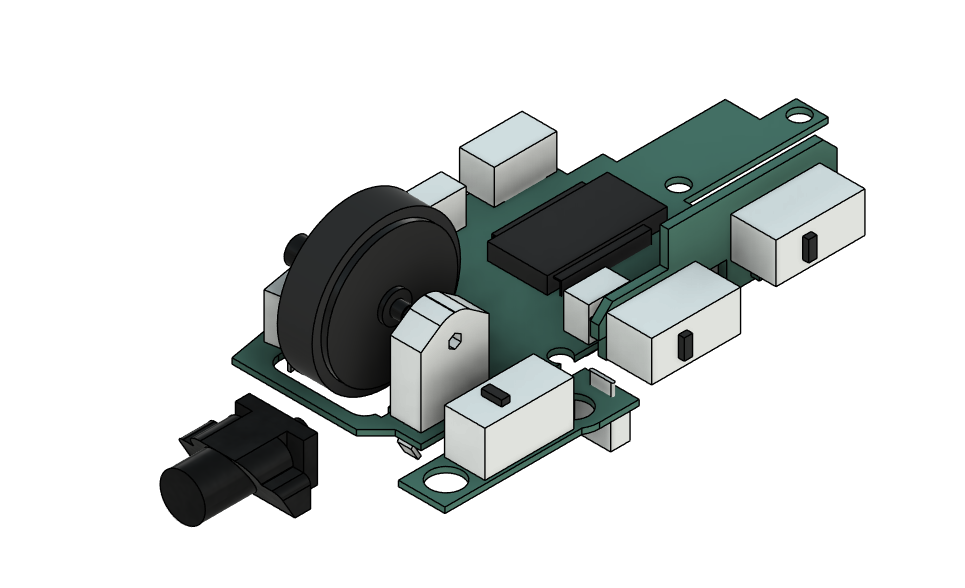
endgame gearのop1 8k v2の基板を3dモデルに起こします。細くて使うのやめてしまったのでマウスMOD素材にしたいと思います。
Endgame Gear OP1 8K V2 マウス紹介基板の採寸はどうするのが簡単で正確なのかとかは知らないので、だらだらと印刷して修正してで合わせました。
センサーのレンズを中心として書きました。op18kv2はコンパクトなタイプのレンズです。datasheetに従ってそのまま書きました。
レンズを忠実に再現するというよりはレンズモデルを引き算すればセンサー周りのボトムシェルが完成するようにしています。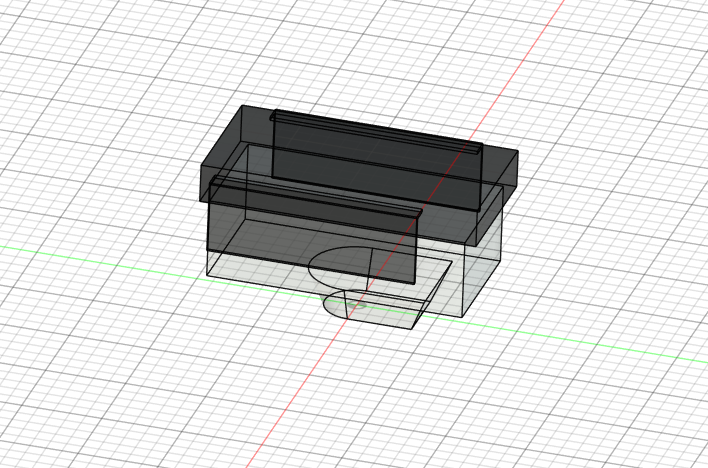
使うことがないような、センサー下の箇所も一応書きました。レンズ外形のガイドと、テーパー状になっている開口部分が引かれています。
センサー下のソール、見栄え的には合ってもいい気がするけどそれだけで売ってたりするのかしら。すると汎用ソールより何かしらのマウス用のソールセットに合わせるのはいいのかもしれない。貼るなら。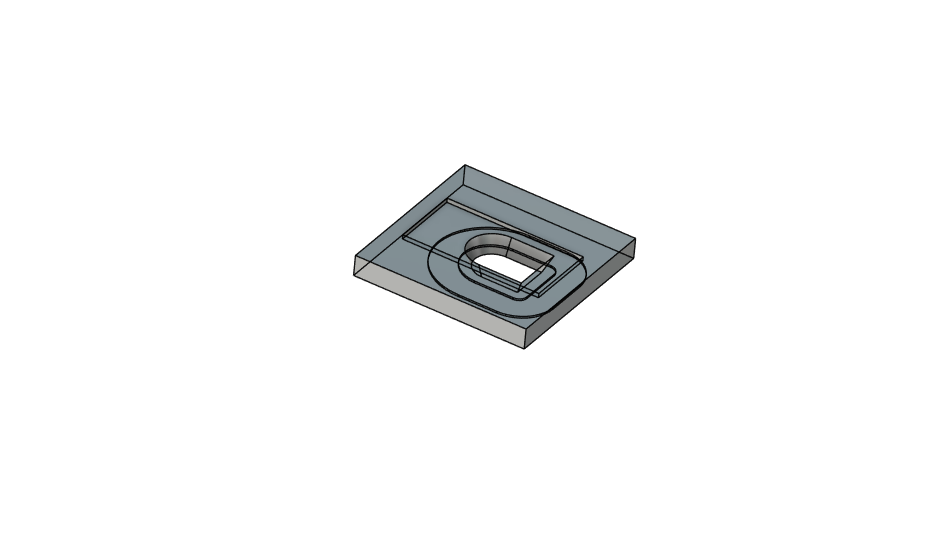
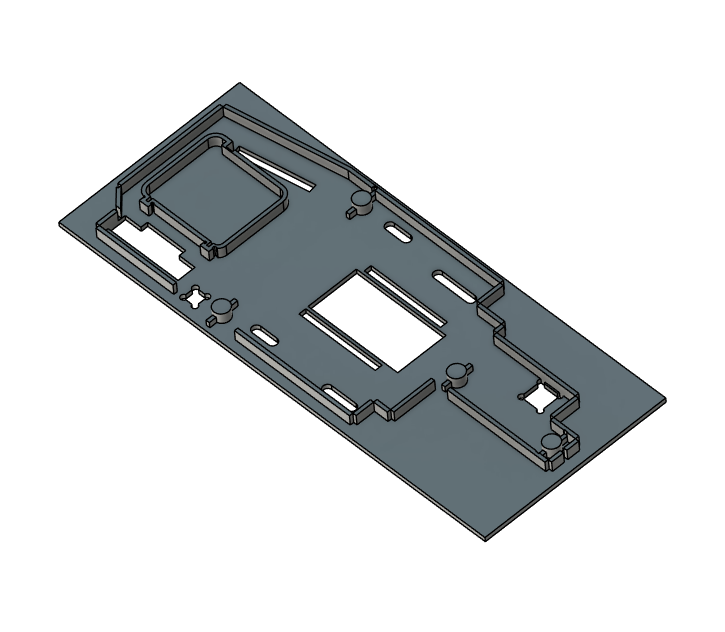
メイン基板のねじ止め位置を決めます。レンズの部分を抜いておき、基準としています。
メイン基板は0.8mm厚です。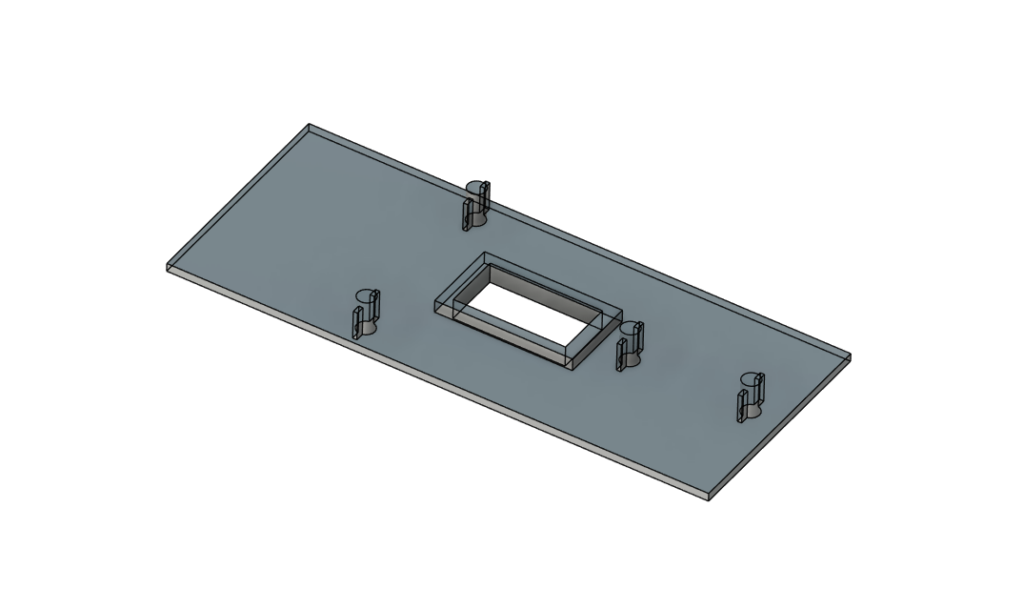
採寸はbambulabのa1miniで印刷して合わせています。
作成したガイドモデルを0.1mmオフセットしたときに基板と印刷したガイドがぴったり合うようにしています、ので実寸モデルというより-0.1mmしたモデルをa1miniで印刷したときにピッタリなモデルという方が正しいです。
テキトウに辺りをつけて印刷、ずれていたら印刷を数十分のサイクルで回します。a1mini様様ですねじ穴位置を合わせた。やっていて驚きましたが、この左右のねじ位置、左右対称じゃないのですね。
メーカー自らmod推奨している基板なので使いやすいのかなと思っていたのですがそういうわけではなさそうです。
数値は私の合わせた値ですが、左の穴の方が遠いです。実装部品が邪魔でとかなのでしょうけど、そこは合わせてくれよと思ったり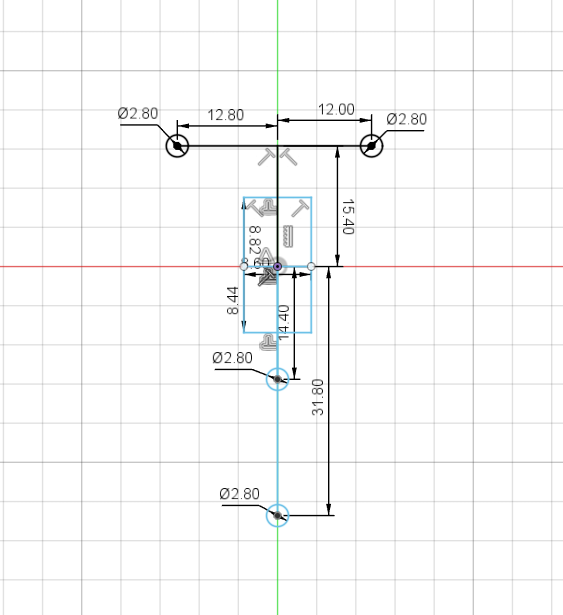
次にホイール下のところを取りました。
ホイールの軸受けのribを通すための凹みが3か所あり歪な形をしています。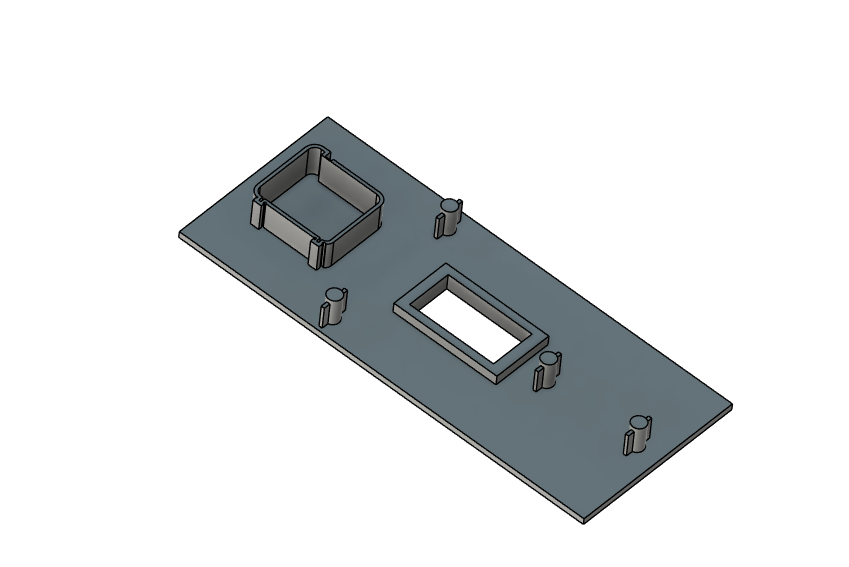
内側の線は取れたので外形を取ります。軽量化のためでしょうがこれまた歪な形をしています。
裏面に実装されているDPIのLEDは若干はみ出しています。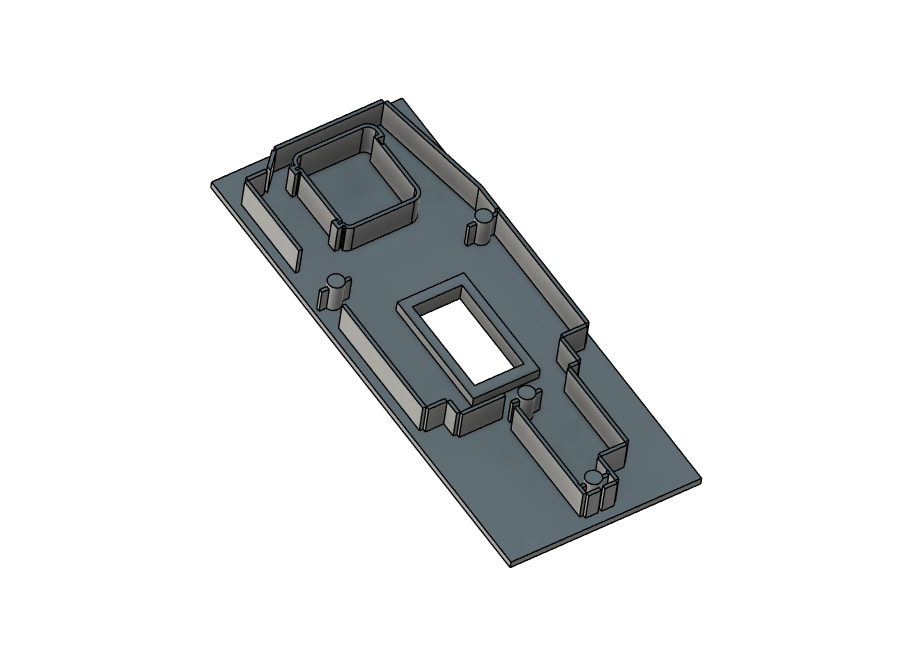
板ができました。
基板後ろのしっぽ部分はDPI切り替えボタンのために生えていて、使わなければカットしてよりこんぱくとにできますというか作例見ていると白いシルクのところでカットしているものしか見ないですね。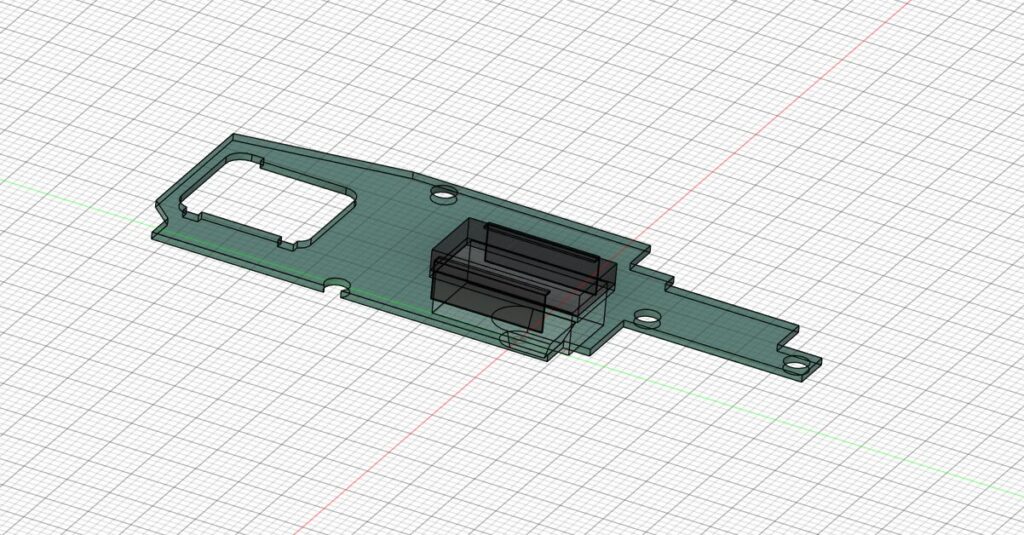
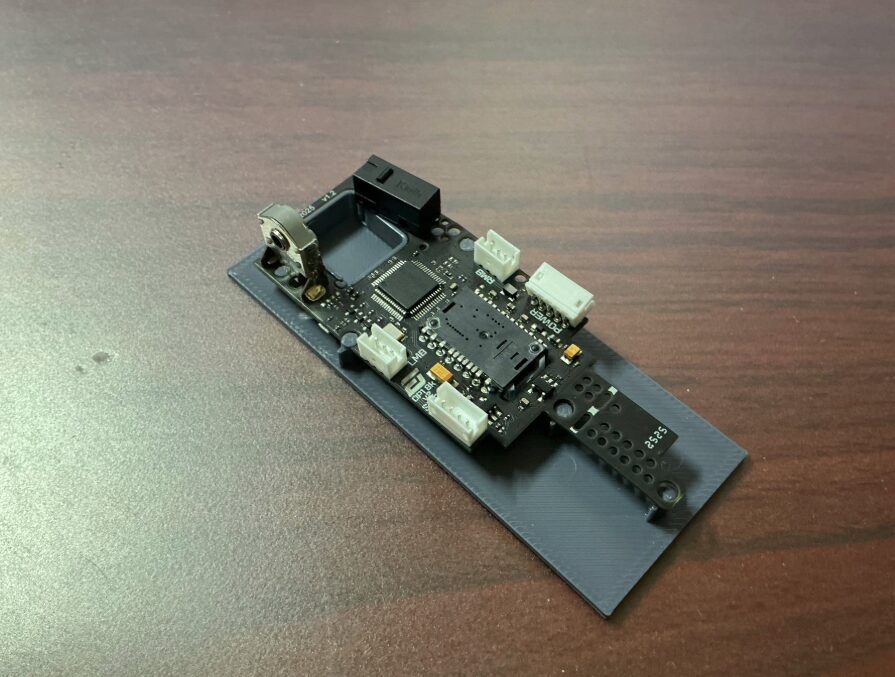
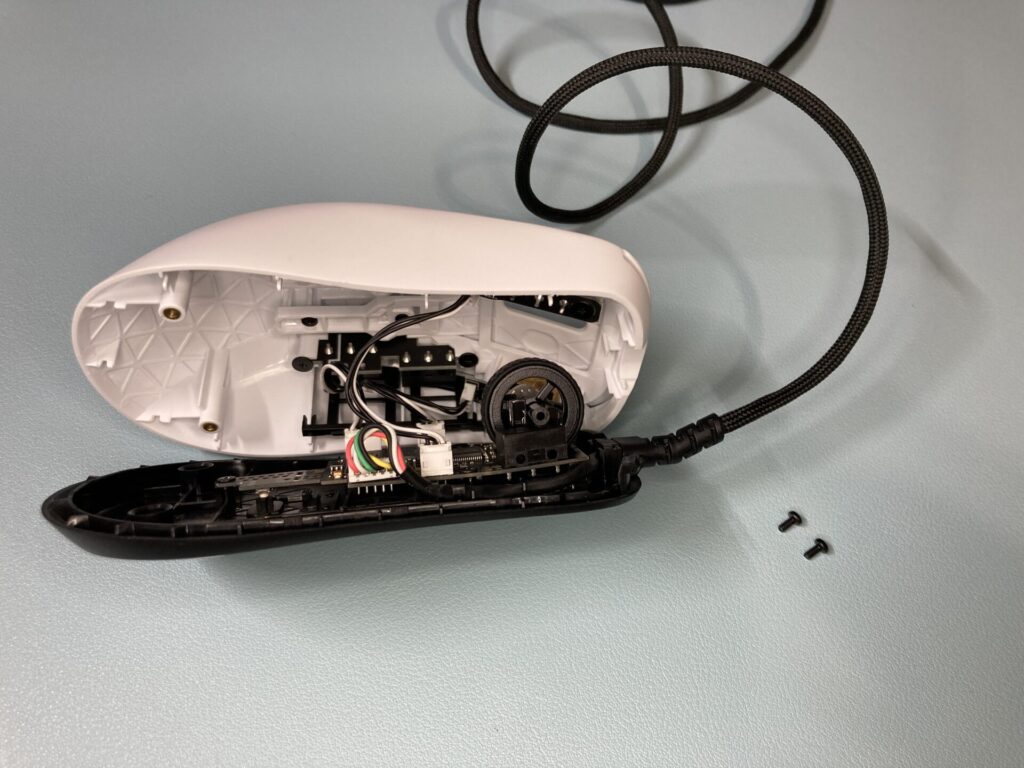
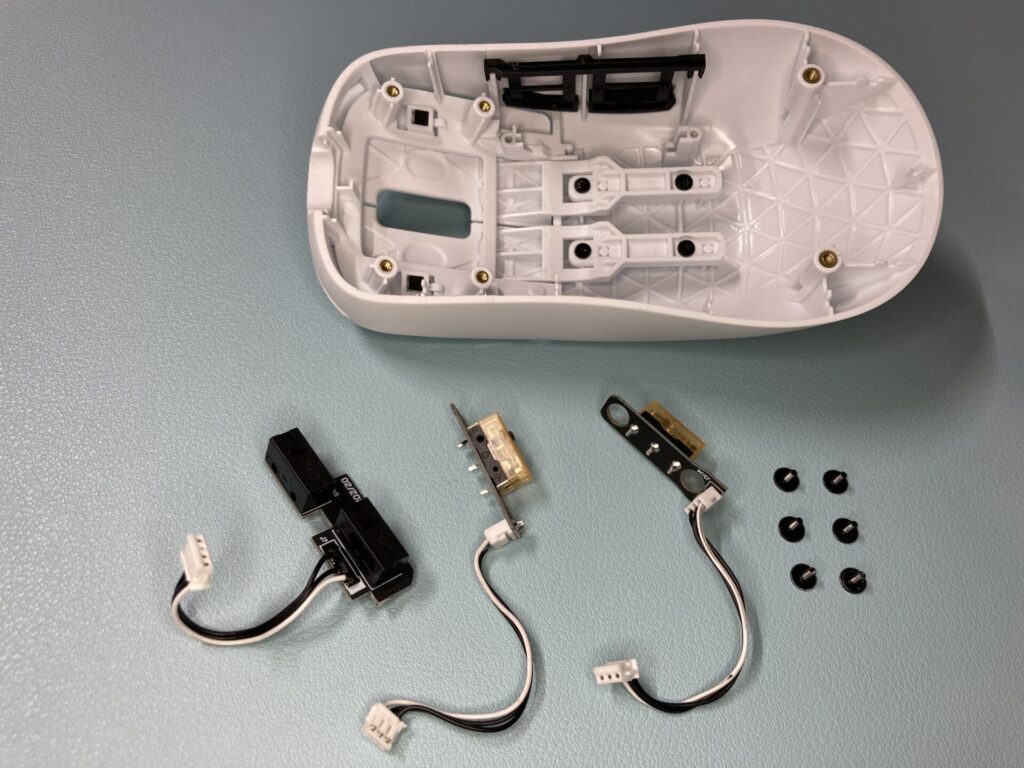
裏面から部品を合わせました。裏面にはコネクタの足、エンコーダとマイクロスイッチの足、DPIのLEDとスイッチがあります。
裏面から合わせればエンコーダとマイクロスイッチも大体合わせられます。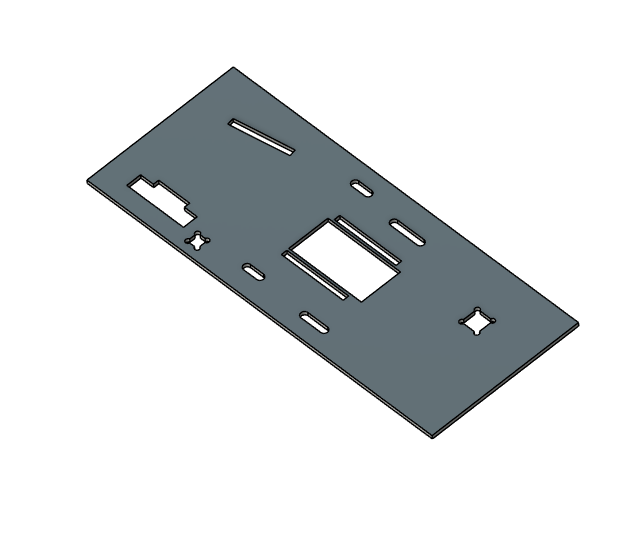
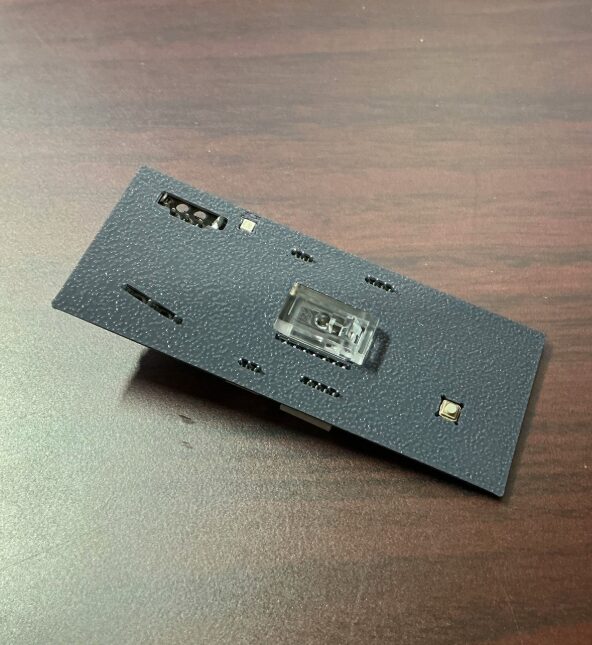
さっき作った基板外形と合わせて基板にべったりの状態にしました。
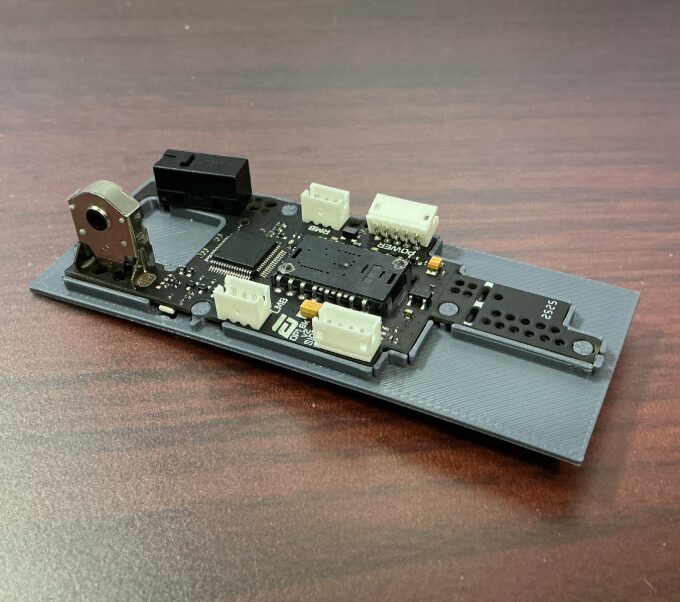
合わせて部品を追加しました。コネクタでスイッチとusbを引き出しているメリットを生かせない構造も多いと思うのでそういう時はコネクタ下に張り付けるように基板起こして一体型基板にしてtypeC化するのもありかなとか思ってコネクタ位置も取っておきました。
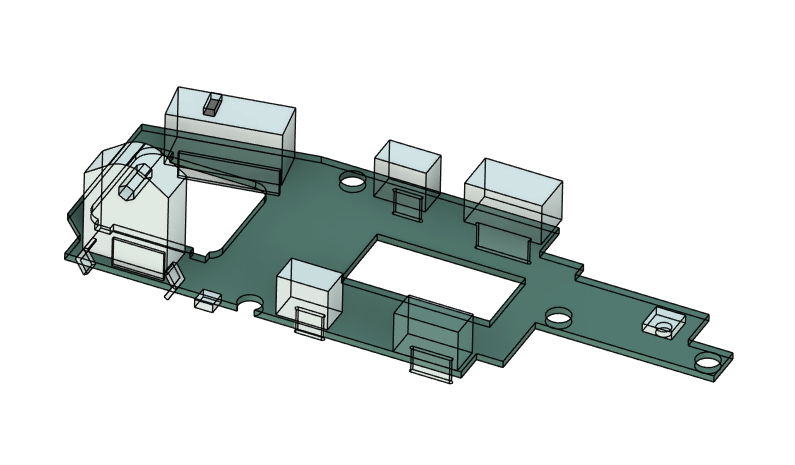
ホイールを追加し、エンコーダとスイッチの前後位置を微調整します。これズレると回していて異音が鳴るのでちゃんとします。op18kv2自体はそこまで固定されていないのかたまに異音が鳴ることがありました。
ホイールの固定は各社いろいろしていますが、op18kv2はシンプルに軸とホイールの間に一段保持のための段差が両側にあり、ここを軸受けに彫りがありぴったり挟み込み受けている感じです。3dp製では彫りを出すのは精度がむりなので軸受けでできるだけぴったり挟むぐらいでしょうか。
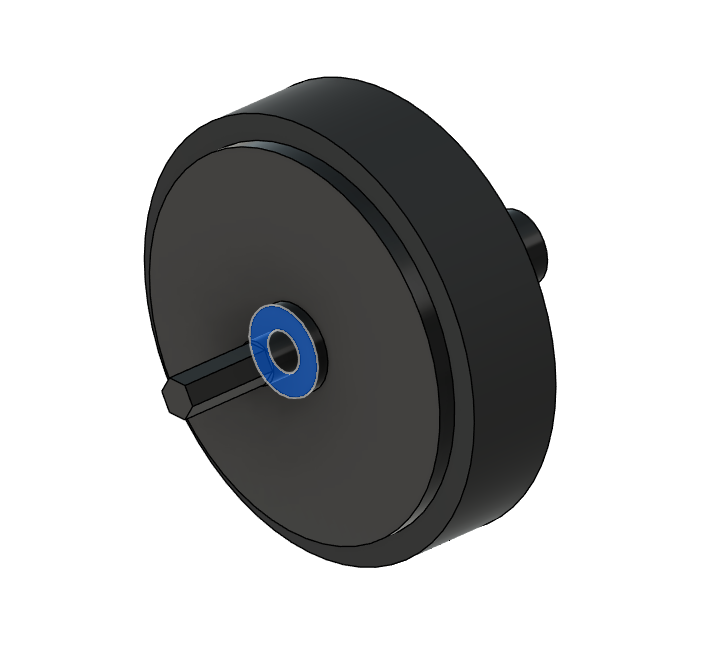
メインスイッチ、サイドスイッチ、ブッシュも取りました。メインスイッチの基板は0.8mm、サイドスイッチの基板は1.2mmでした。
ブッシュは取ったけどこのケーブルケーブル自体の取り回しはちょうどいいがブッシュ回りがごついの好かないんだよな。ケーブルは自作したのを使いたい感じ。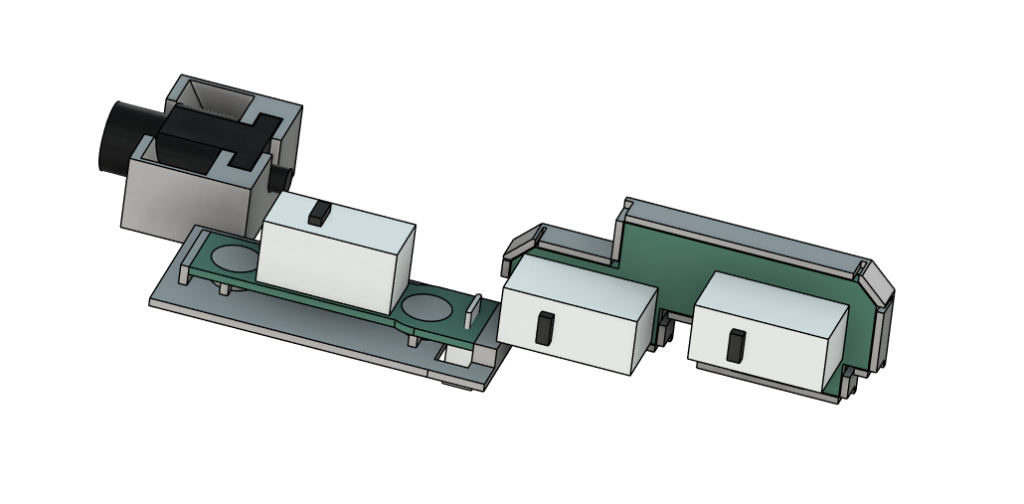
まあネジ穴とホイール位置だけあってればいいかなというところはあるので他は雑な感じで
何か自作マウスに取り組みたいところですが、割と基板起こすだけで満足してしまった。
MJFプリントを中華に投げるのが時間とか金とか精度とか物性とかちょっと嫌になってはいたのでFDMでの印刷に向いた感じで作りたいなと思ったり。すると嵌め合うよりワンピースのほうがいいなと思うのですがするとop18kv2のセパレートを若干生かしづらい気もしたり。
有線マウス積極的に出してるのがeggだけな以上、自分で基板起こす以外はop18kv2だけで遊べるのかなと思うんで遊びたいですね。
スイッチパックも公式で売り出していますがどうなんでしょうね。高速応答を謳っているならホットスワップでなく接点は接合しておきたい気もするけどそれを言うとコネクタ接続ではあるのだよな。gxスイッチのやつはずっと売り切れだしGXスイッチ単品もアリエクとかで売っているのを見ないが探せばあるのだろうか。使う人いたらデータ置いておきます。書いてますが実寸でなくウチのa1mini-0.1mm合わせです。
-
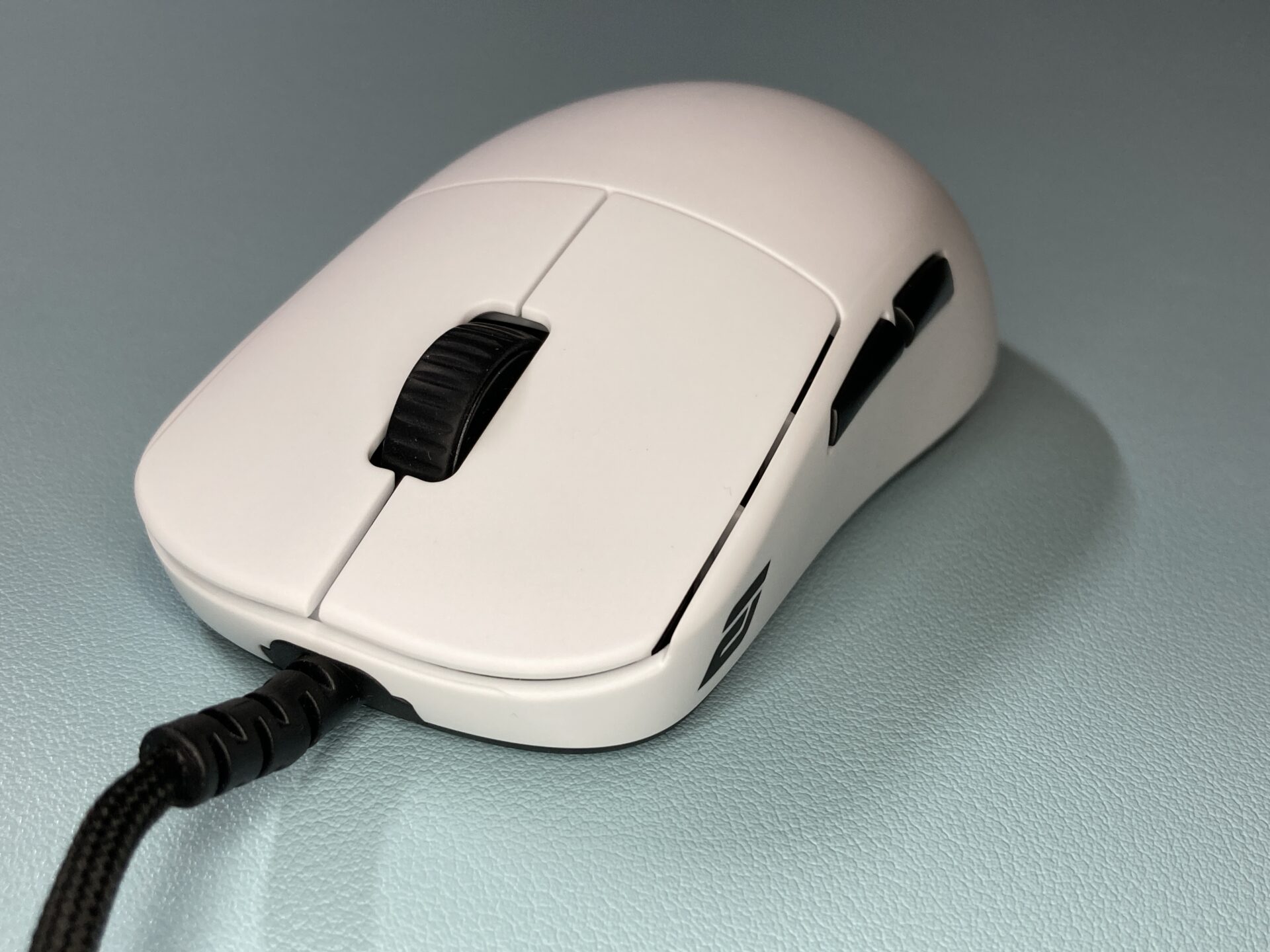
Endgame Gear OP1 8K V2 マウス紹介
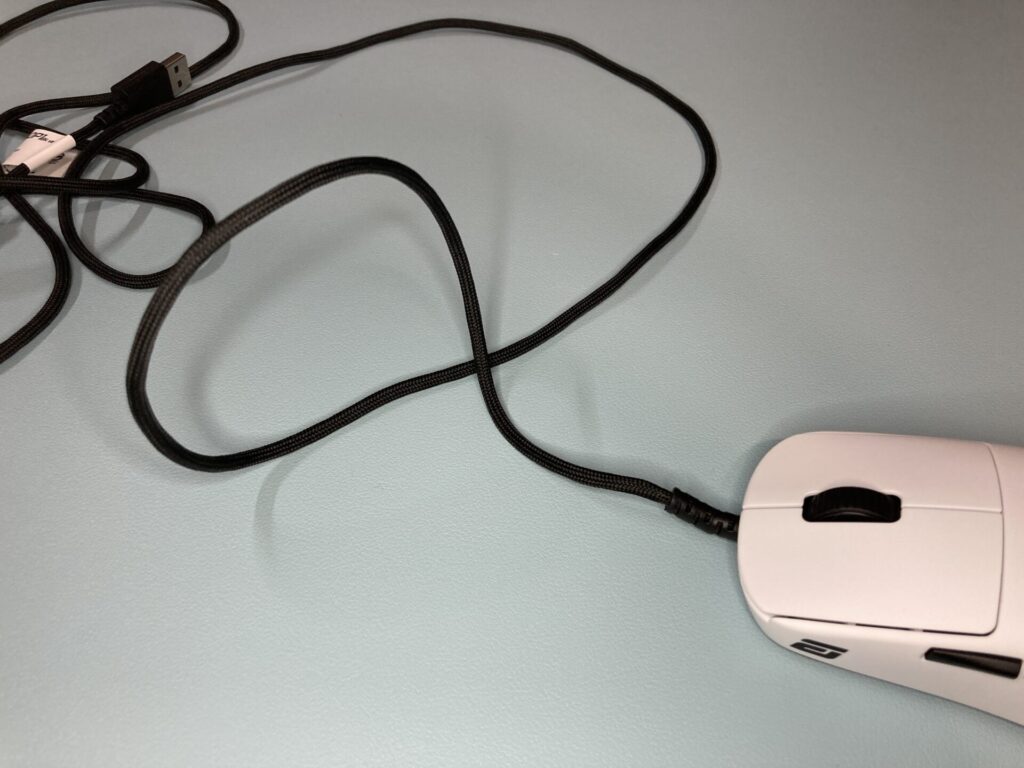
有線ゲーミングマウスendgame gearのop1 8k v2を買ったので紹介します。
表
名前 endgame gear op1 8k v2 色 黒/白/黒フロスト 接続 有線 USB HS 解像度 10-30k dpi ポーリングレート 1, 2, 4, 8 kHz センサー PAW3950 U+1F95A メインスイッチ kailh GX エンコーダ kailh df 9mm 長 119 mm 高 13-37 mm 幅 55.5/52-55/52-61 mm 重 49.5 g 13600円
op1 8k v2 – egg
op1 8k v2 – アーキサイト外
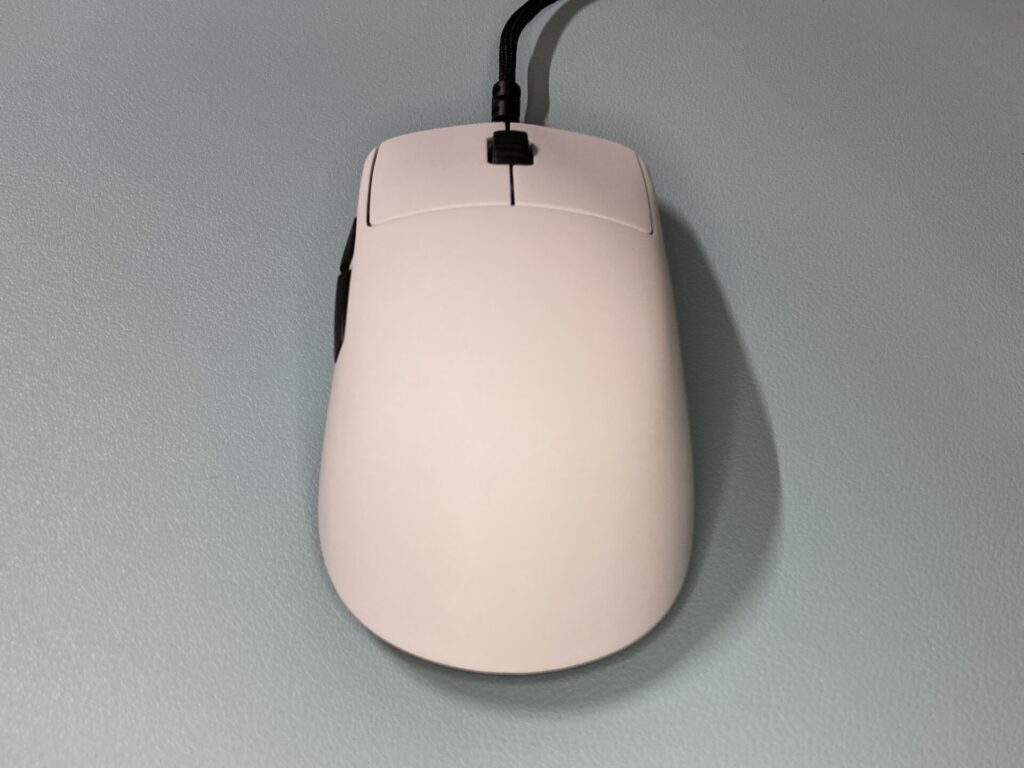
左右クリック、ホイール、前後サイドボタンがあります
長さ119mmぐらい。上側幅はフロント55.5mm中央55mm後ろ61mmぐらい。
フロント上部が若干広がっています。全体的に細身です。
底面にはdpi切り替えボタンがあります。
下側幅はフロント52mm中央52mm後ろ61mmぐらい。
ボトムは中央からフロントにかけて幅は変わりません。尻からのくびれは緩やかでxm1と違い指の強い引っ掛かりはありません。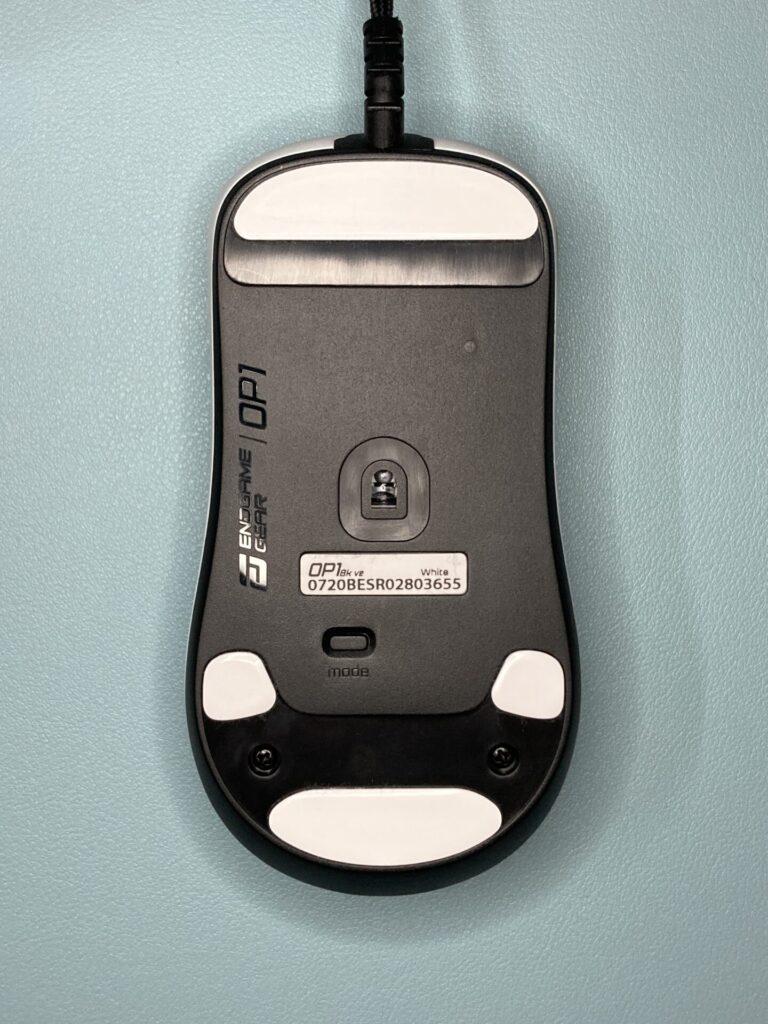
高さはトップが37mmぐらい、MB先端がが13mmぐらいです。
フロントは低く後ろ重心ながら尻のRが大きいeggらしいシルエットをしています。
ケーブルブッシュがごついです。

側面は3mm程度逆テーパーとなっています。
MBには微妙に指のガイドがへこんでいます。
背面からのトップシルエットはR大きめに膨らんでいます。丸みを帯びながらもsensei棟と比べると角ばっています。

ケーブルは直径4mmぐらいです。細すぎず太すぎず、硬すぎず柔すぎずというところです。
使用していてケーブルをマウスで踏むことはないので普通によいと思います。よく柔らかいことが良いとされていますが踏むので私は好みません。





中
底面のネジを外すと分解できます。メイン・サイドのスイッチは基板が分かれています。
ケーブルはzhコネクタです
基板は細長いです。
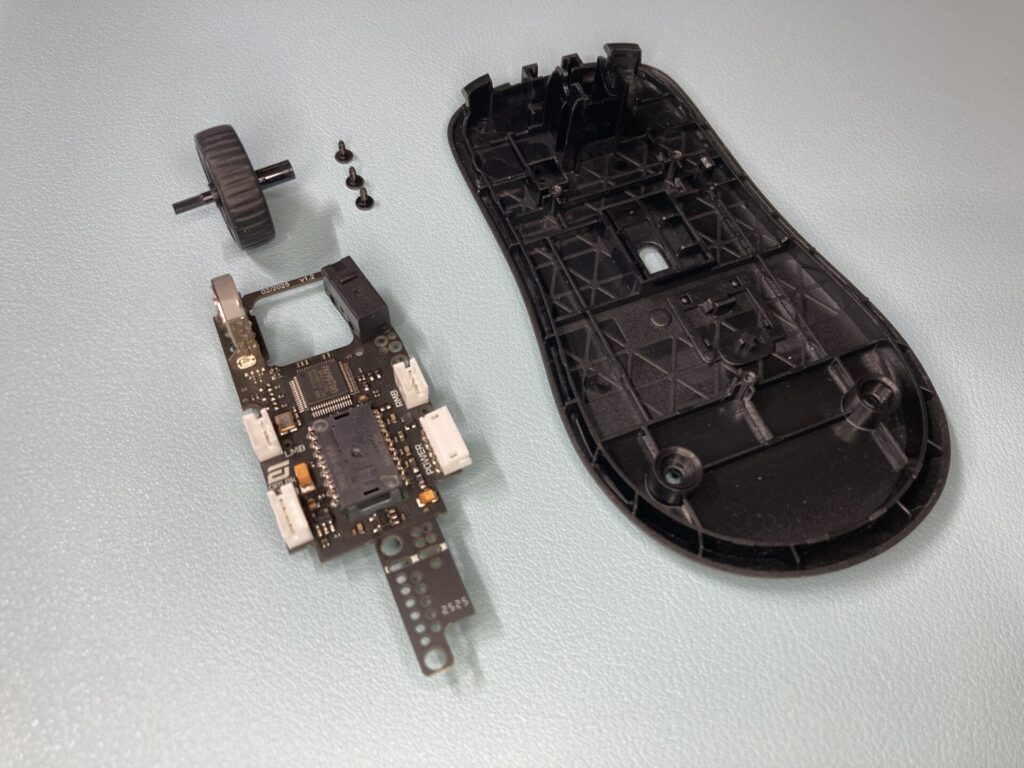
基板後方の伸びている部分はdpi切り替えのボタン用に伸びているようです。
センサーのレンズはコンパクトなタイプです。しっかり固定されています。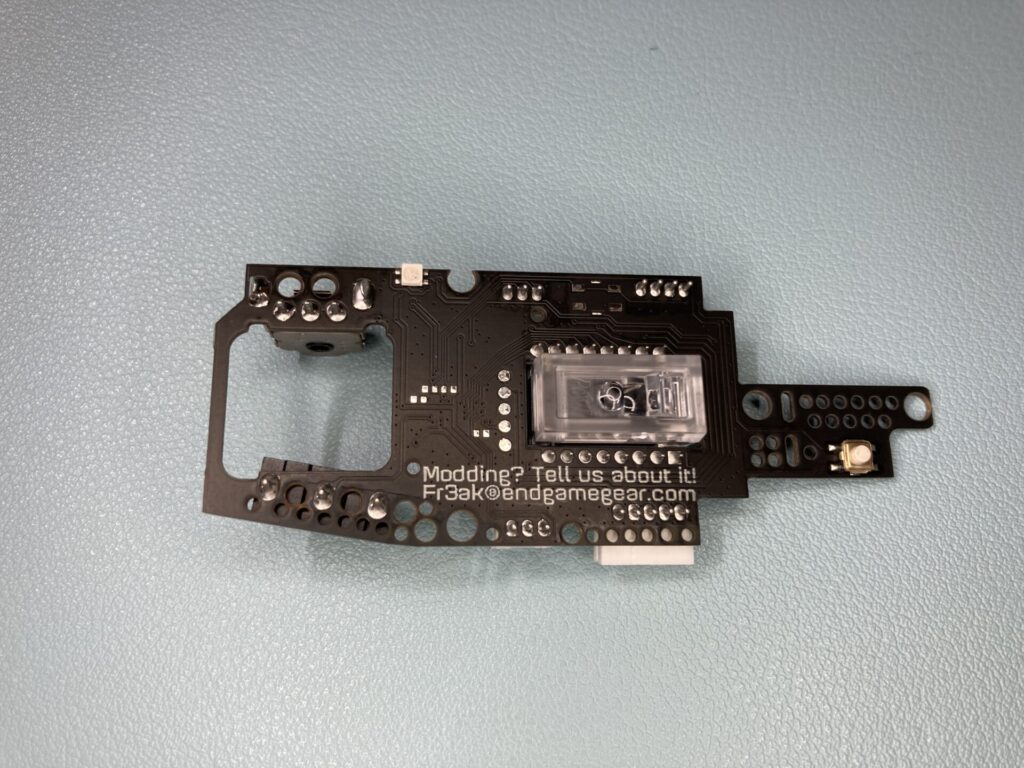
ユーザーでの分解を想定されている箇所、シェルとメインスイッチ取り付け部はインサートナットが使用されています。
メインスイッチはホットスワップや実装済みの交換基板が発売されているようです。
2接点検知用のデフォのGXスイッチが性能的にはよいのでしょうか。両面にコンタクトピンついたバネ使ったスイッチなら安定するんですかね?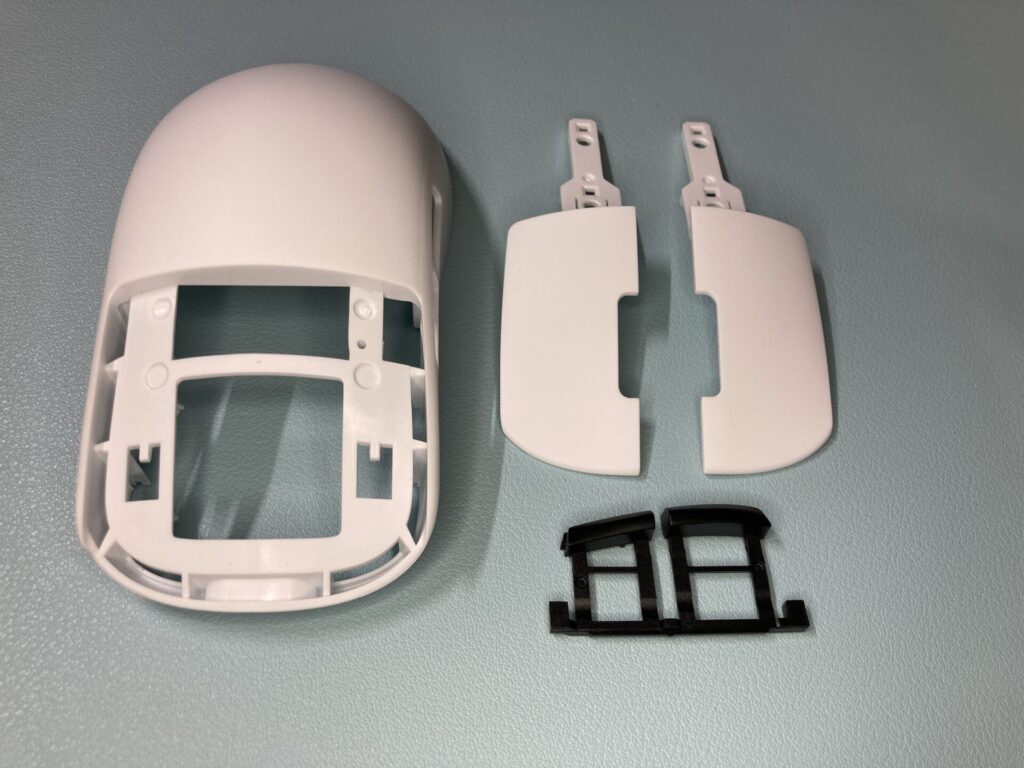
ソフトウェア
OP1 8k v2 Configuration Toolを使う様です。シンプルな画面です。
Basic setting
LOD:0.7-1.7mmの間で0.1mmステップ
angle snapping:カーソル移動が縦横真っすぐに補正されます。
disable LED on lift-off:マウスを持ち上げるとdpiステージを示すLEDが光ります。が光らなくできます。
cpi level:4ステージまで設定できます。底面ボタンで切り替えできます。
x/y setting:縦横の解像度比をいじれます。
ripple control:スムージングするのでしょうか。よくわからんのでオフにしています。
CPI:10-30kの間で設定できます。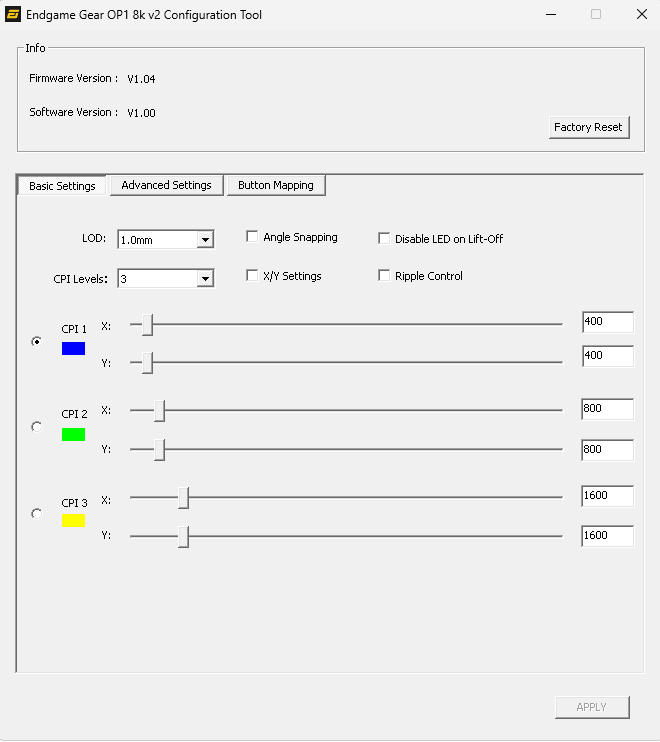
Advanced setting
motion sync:センサー読み取りとusb通信同期していい感じになるのでしょうか。よくわからんのでオフにしています。
polling rate:1, 2, 4, 8kHzから選択できます。
slamclick filter:マウス置いたときのクリック誤入力防止機能
glass mode:ガラスでいい感じになるのでしょうか。
multiclick filter:デバウンスでしょうか。
spdt:2接点目でも検知するもの。押し込まれている途中に検知する光学スイッチより物理的に早くなりそう。処理はまた違いそうですが。
sensor angle tuning:センサー角度変えられる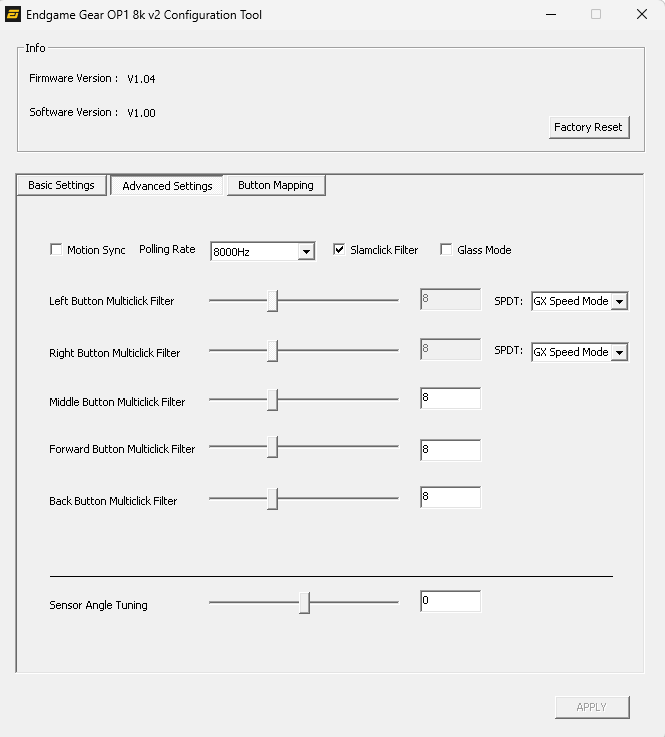
Button mapping
左手モードがあるらしい
各ボタンのマッピングは基本的なキーは振れそう
底面ボタンは変えられない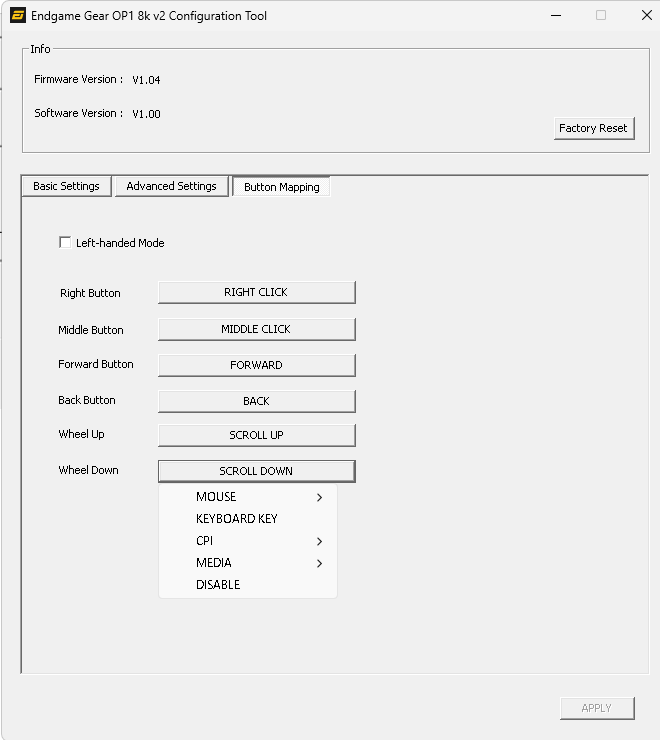
感
貴重な有線マウスです。もはや有線マウスを積極的に販売しているのはeggだけな気がする。
op1発売時は細くて合わず買いませんでしたが有線これしか売っていないので13,600と高いですがv2買ってみました。が結局形状合わずじまいでした。重さは50gぐらいで普通に軽い。軽量化という意味ではあまり頑張っていないのでしょうけど、ふにゃふにゃするよりは分厚いシェルでいいと思います。
剛性 感 は普通にあって使っていてイライラは無い。ケーブルも普通に取り回しよい。
ボタンはメイン・サイド共にクリスピーさを押し出した感じ。大味だがgm8.0とか光学式の時よりいい気がする。ジッタークリックはしにくそう。立て付けは悪くない
ホイールは相変わらずkailhな感じで押し込みは重め。たまにガリガリ回って立て付けがそこまでよくない感じ。構造的にも特別ホイール位置を安定させる感じもないためそんなもんか。気になりポイント
-
[自キ]BNY6X V2 ②GH60互換60%キーボード試作品届いた
設計してJLCに発注したものが届いたので組み上げて使ってみます。
https://note.com/tsuiha/n/nb2ebad97e522
noteで紹介しています
https://github.com/Tsuiha/BNY6XV2
githubにもデータ投げています。基板
基板に部品実装しました。問題なく動作して一安心です。
ロープロスイッチにも対応させているので1.2mm厚です。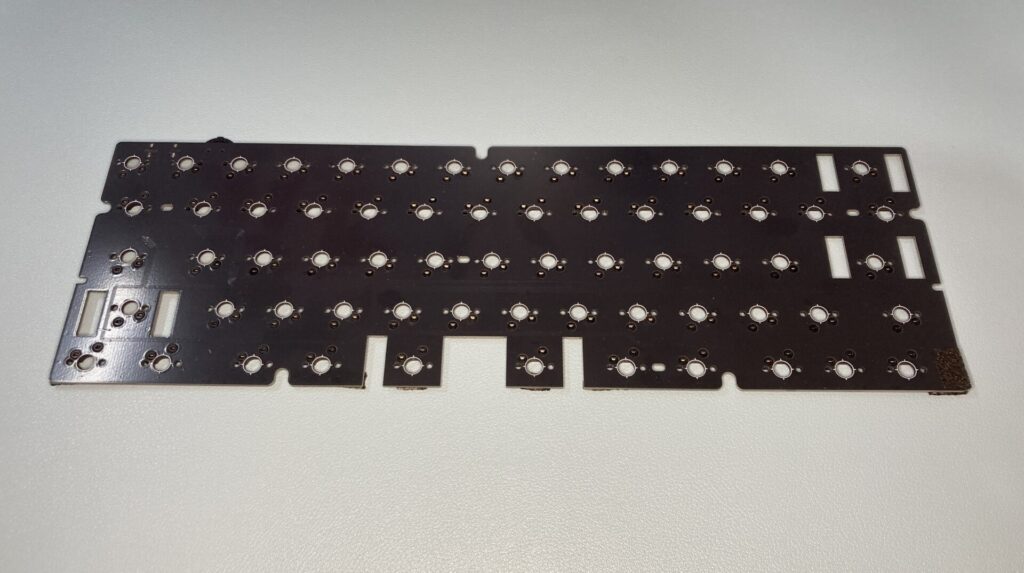
ダイオードをまとめて配置しているので実装作業はめちゃくちゃ楽でした。
Nitingale B2から引き続きSTM32F072も楽でよいです。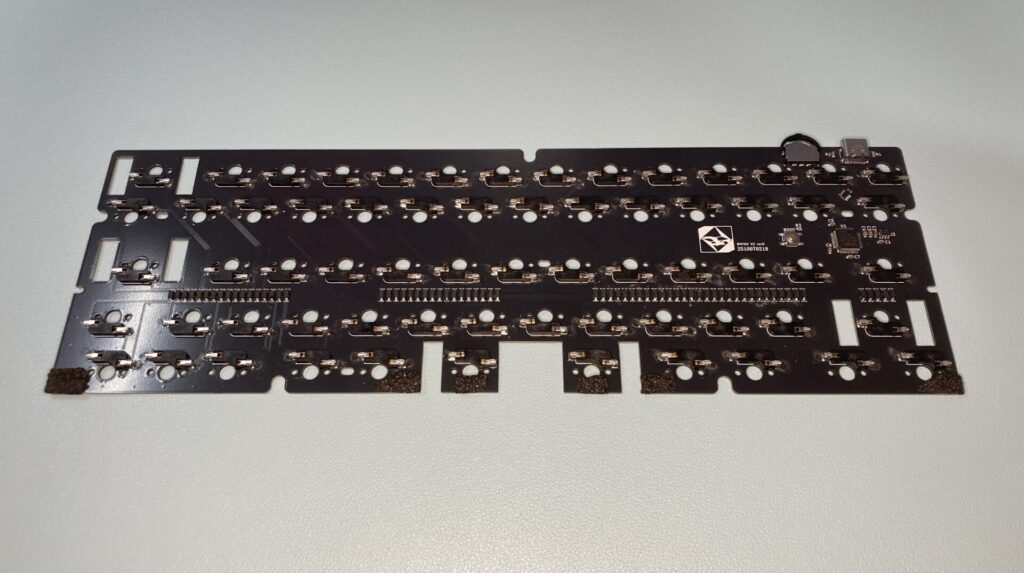
これはレバースイッチを実装しているので専用ケース用です。
GH60互換ケース用の基板はレバースイッチは実装していません。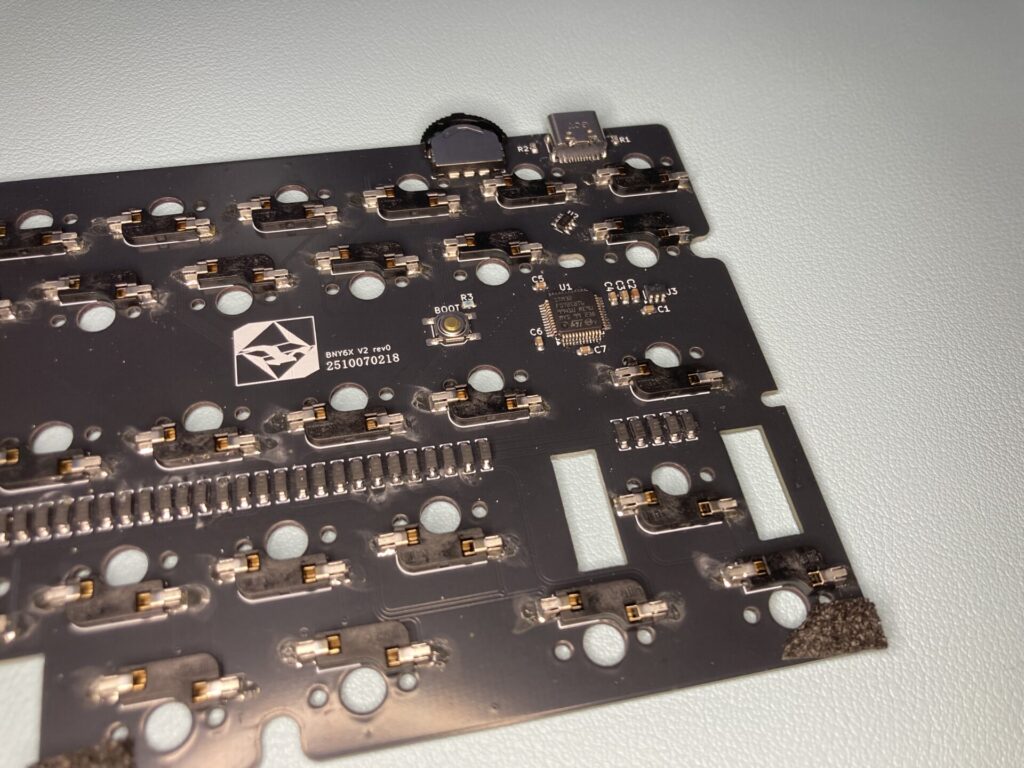
GH60互換ケース
こちらは2回目の試作になります。1回目のものでも問題はなかったのですが気になる点がいくつかありました。
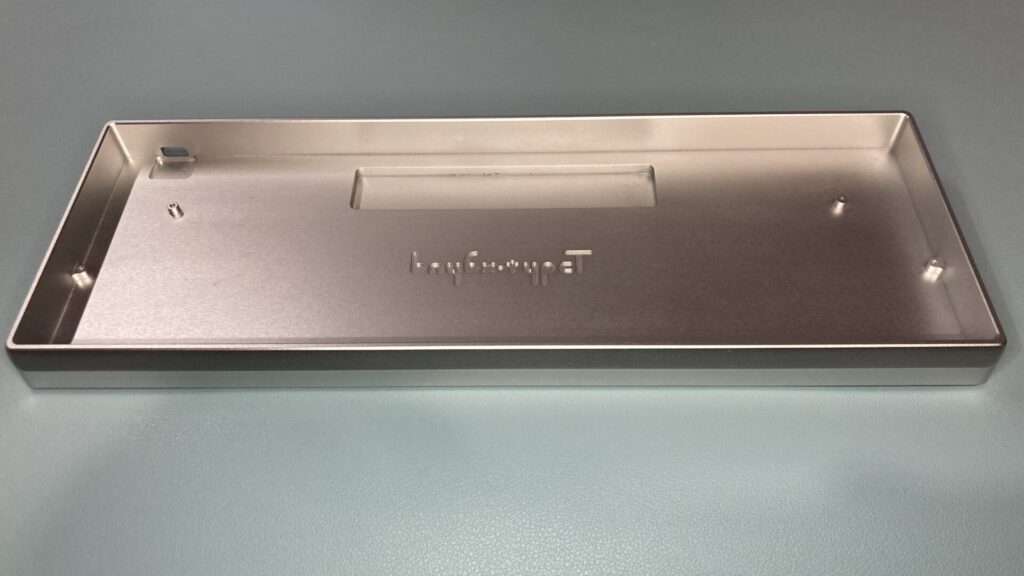
まずJLCCNCではきれいに加工することができない箇所があったこと。できるだろと思うのですが加工端が合わさる箇所はまずきれいにやってくれないので、やや単調な形状に修正しました。後ケース中央にロゴを掘ってみました。これは一筆書きというかただ掘るだけなのできれいに加工されていました。機能性は関係ないですが特別感でてよいですね。
左右端のネジ穴ですが、これ2Uシフトを考慮するとスタビライザーと干渉するのですよね。なのでギリギリまでケース外側に再配置しました。
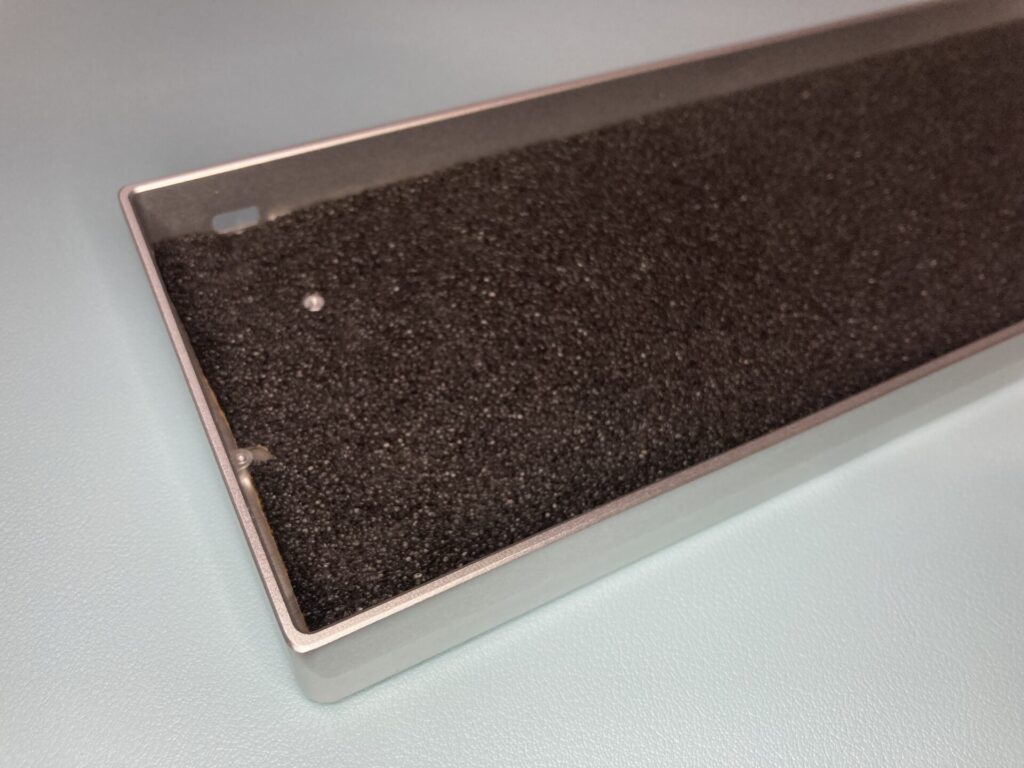
ケース内奥のスペースには相変わらずソルボセインと真鍮パーツを仕込み制震しています。人それぞれ好きなもの詰めたらいいと思います。
裏面はこんな感じ。滑り止め部は横一直線に掘っていて、好きなサイズのソールを張ることができるようにしています。
チルト部はやや独立するような形状にしてみました。デザイン的に直角はダサいかもですがJLCが加工しやすいかなと思い、、、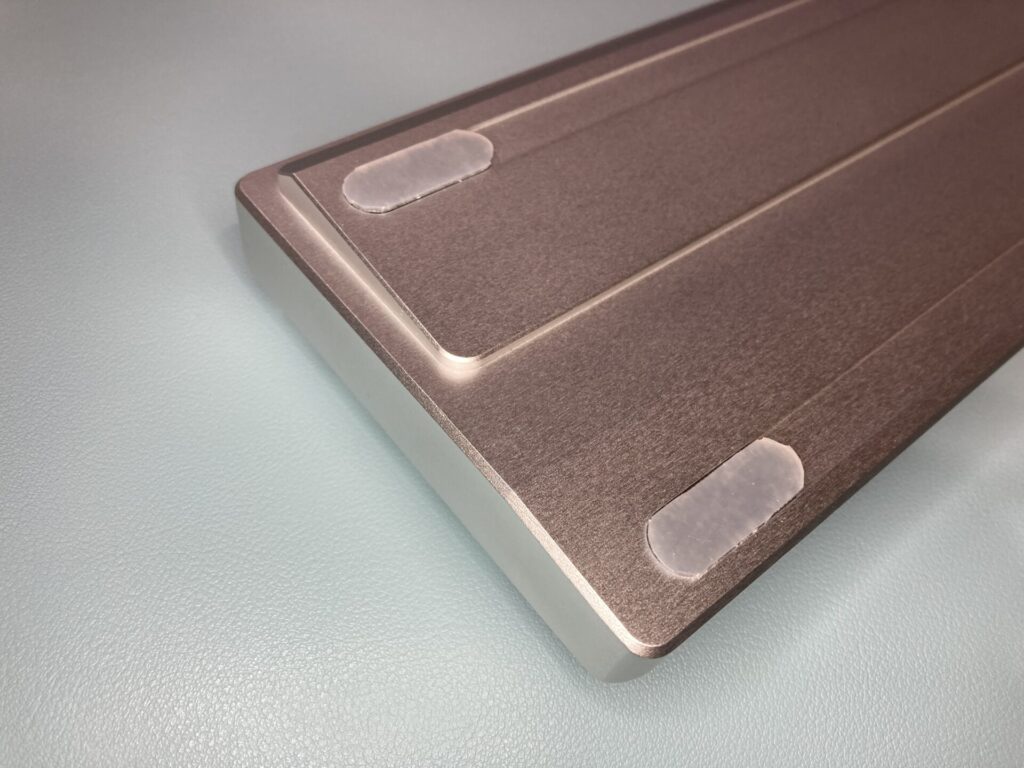
開口部はこのような感じ。チルト部と開口部で2度削り出すので、ちょっと切削跡が残ってしまっています。

やや奥まった印象。
初回試作より、ちょっと前後のベゼル幅を広くとっています。やや重厚感が増したでしょうか。
上側は切り落としていて、トップのベゼル幅は薄いままを保っています。私はCtrlや矢印を指の付け根で押すことがあるので、ベゼルが太いと厳しいのです。
べぜるはキートップの縁まで高さを設けています。
上から見ると割とスリムではないでしょうか。
配列の隙間には3DPで印刷したブロックをプレートにねじ止めしています。これもCNCで注文したのですが輸送中に紛失したようで、、、泣き寝入りです。
角部は丸めているのですが天キー見ていると角張ったものも多く、そういうのもよかったかなあと今更ながら思ったり。
ねじ止め箇所は左右4か所だけですが、エプトシーラーを全面に引き基板を支え中央のたわみを防いでいます。
組み立ててみるとむしろ中央部が少し盛り上がっているぐらい。
手前はスイッチギリギリまでケースの高さを抑えているためですね。高さは抑えるに越したことはありません。自作キーボード8年やってこれはずっと揺らがないですね。
現在のビルドはFR4プレートにミドルフォーム無し、ボトムエプトシーラーのみです。スイッチはvertex v1です。
やや高音寄りのclacky寄りな感じです。上質な打鍵音とは言えませんがアルミケースとFR4板とvertex v1それぞれの質感が順当に足し算された感じです。悪くはないなと思います。
私にしてはケースに重量がある方ですし、ベースの安定感はあるなという印象です。
4か所ねじ止めしている付近はやはりアルミケースの固さと音が前面に出ていて、まあそういう意味ではガスケットマウントは素晴らしいのだと思います。 根本的に私は不快でなければ何でもいい人なので十分だなと感じますが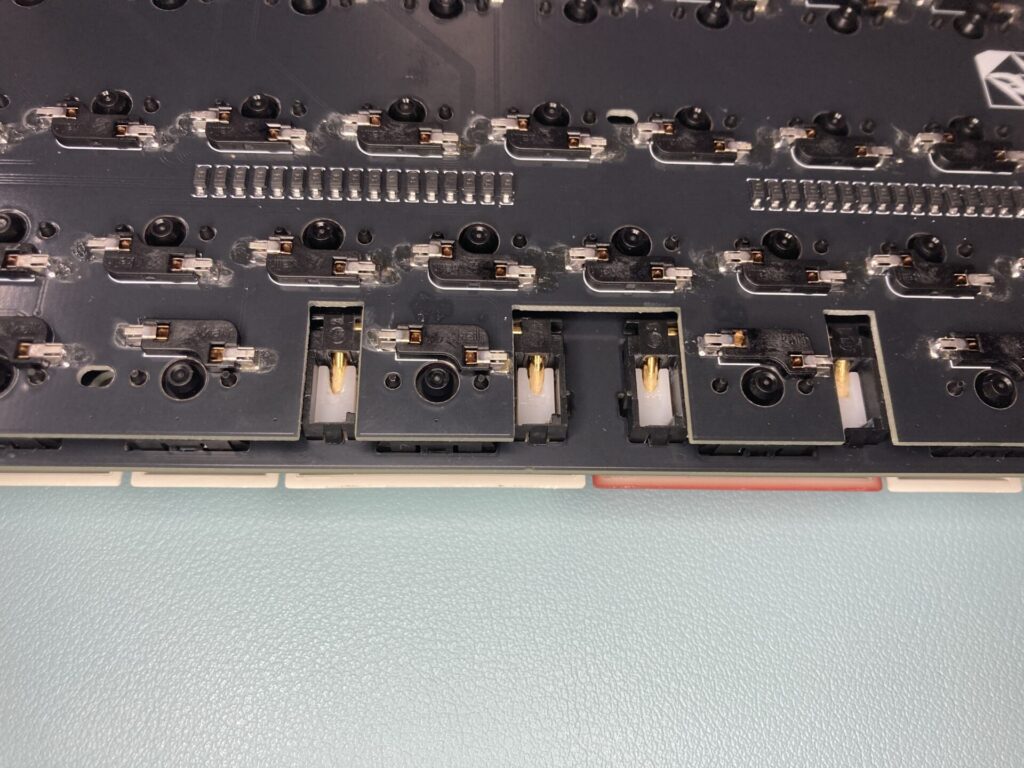
基板を見るとわかりますがプレートスタビのみです。KS-57を取り付ける以上こうなります。ので2Uキーキャップは予め嵌めておく必要があります。微妙かなとも思いますが、ロープロ共用はこうなるなと。
あるいは、最初から切り離さずにランナーでつなげておいてロープロ用では切り離すとかでもよかったかもしれません。LPケース
gateron lowprofile 3.0とかgateron lp 3.0とかks-33bとか呼ばれてるやつです。
ロープロケースは一度目の試作のもので使っています。実はアップロードしたデータは一か所修正しているのですが、致命的ではないのでそのまま使用しています。というより高すぎて再注文する気がないです。3万円ですからね。しかもJLCは次も割って送ってくる可能性もある、、
トップケースの左右手前にボトムケースに対する止め部を追加しました。
というのは左右手前がねじ止め箇所が遠く角が押すと下に下げてしまっていたからです。手元のケースではフォーム挟んで同様にしています。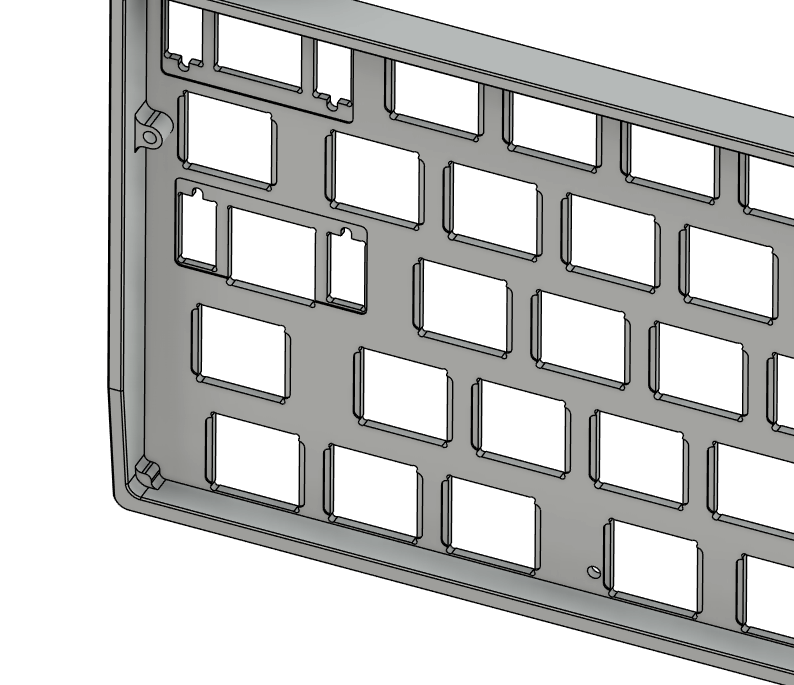
ポリカの削り出しはくすんだ感じできれいです。若干ムラがあるのでもう少し丁寧に後加工してほしいところですが。
プレート部は1.2-1.5mmでルールに対しても薄めですが、枠部はしっかりルール以上の厚みを持たせています。
KS-57スタビライザーはばっちりはまってくれました。
裏側。見えにくいですが爪が引っかかるように1.2mm厚に彫られています。
セルフタップはさすがに怖いのでトッププレートはねじを通すだけの穴で、下のアルミにねじ止めします。
プラパーツだと歪みとか起きないか気になるところですが、今回のPC削り出しでは全く気になりませんでした。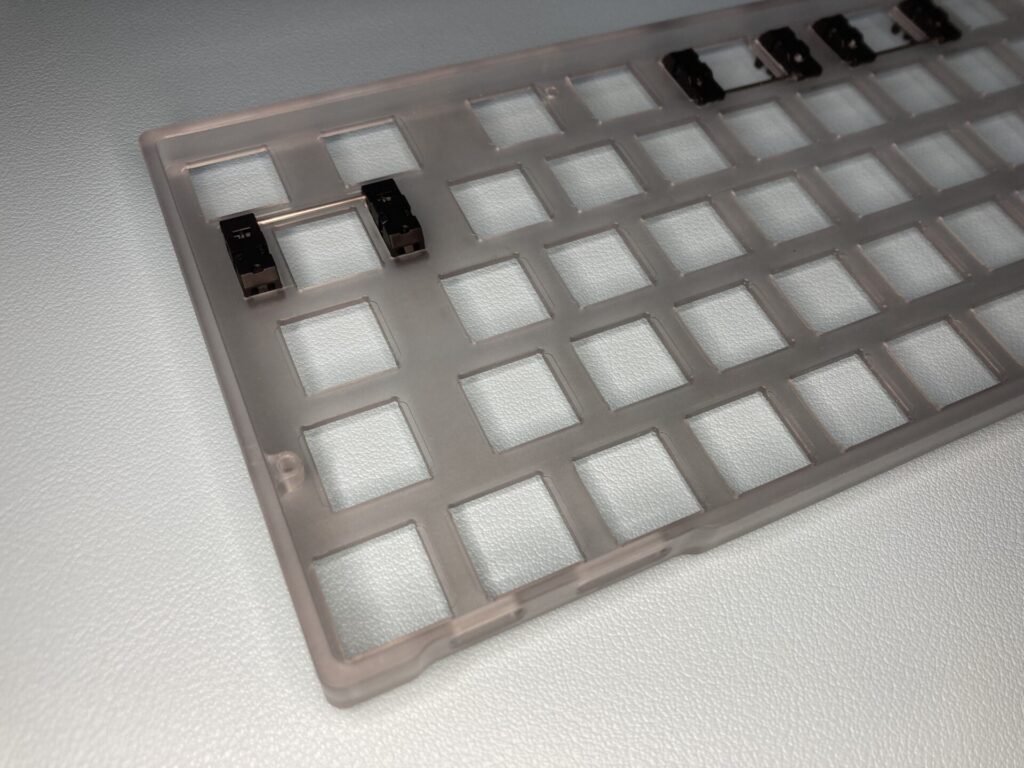
ボトムアルミ。こちらも雑にエプトシーラーを張り付けています。まあなくてもいいかな
こちらも形状はGH60互換と同様にスイッチすれすれの薄さにしています。チルト角はどちらも6度です。
こちらも似たようなソール部です。より薄くするため、彫り量を抑え滑り止めもクッション性は落ちますが薄いタイプで。
余談ですが滑り止めはシリコン素材に限りますね。それ以外は止まらないです。
まあキーボード用マットとかを敷くのであればそもそも滑り止め要らないしむしろ邪魔なシーンも出てくるのですけどこういう板にねじ穴がついているだけなので、アルマイトする際に金具の跡がついてしまうのは設計上の問題ですね。でもだからどうすればいいかも思いつかないのでそのままです。

ただかぶせて5点ねじ止めしているだけです。
スイッチは最初静音のblush nanoをつけていましたが、grey heronに交換しました。かなり打鍵感良いと思います。
上から見る分には隠れるのですがトップにねじ頭が見えているのはマイナスでしょうかね?
薄いので開口部は丸々えぐれたように外周を削っています。こちらは専用ケースですからレバースイッチを搭載できます。

横の図。薄くていいですね。フローティングでkeychronのような感じです。
構造もよく見えますが何も考えていないintegratedです
チルト角6度もついているロープロキーボードは珍しい気もします。どうでしょうか
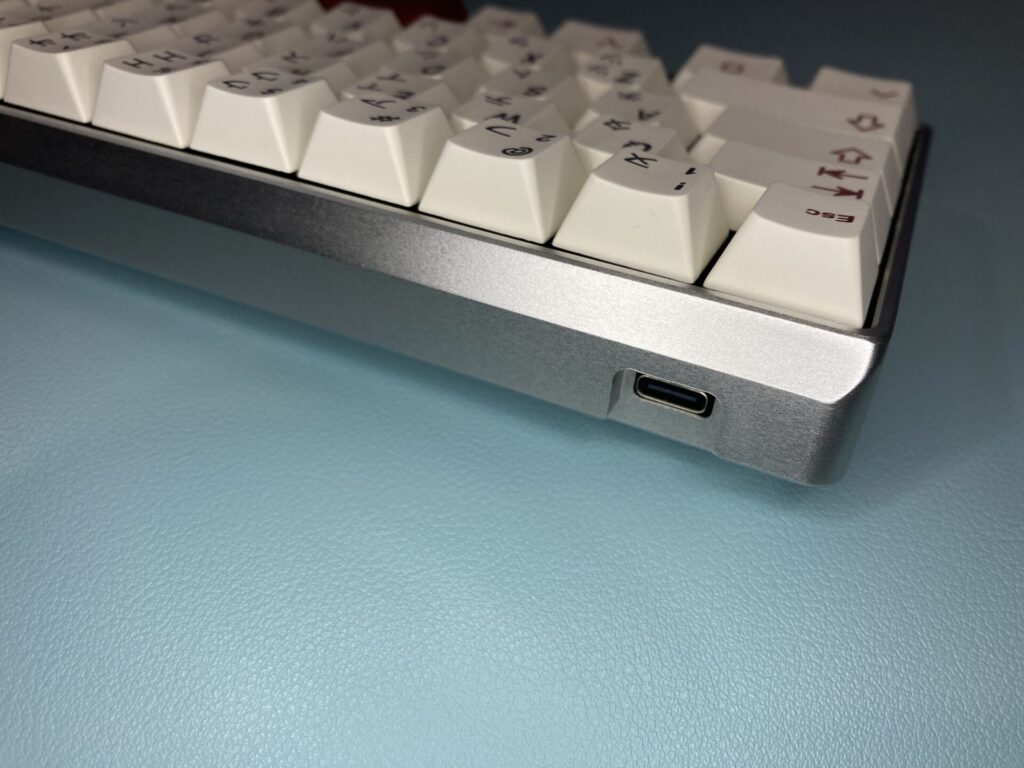
ベゼルも頑張って押さえました。設計者ならわかると思うのですがソケットが飛び出す以上完全なベゼルレスってできなくないですか?手前側は1.1mm、横は1.3mmベゼルが飛び出しています。

結構コンパクトにできたのではないでしょうか。
最近はロープロはむしろガスケットマウントばかりな気もしますがベゼルレスもいいと思います。
おわり
設計的に満足したかというと全然していなくて、初回試作という感じです。ただ使う分には問題ないのでBNY6X V2は終了です。
ケースなんて見ればわかりますが箱にねじ穴押し出してるだけですからね。
特に意味もなく共用基板としましたが、こういう試作で、一回でMXとKS-33b用両方作るなら効率よいしよかったなと思います。また今後大きな転換期が合ったら色々アップデートしつつまた作りたいですね。その前に磁気対応版な気がしますが。
配列的に矢印ありつつ親指キーも十分ありつつ、左右対称性もあり、かなり気に入っています。
レバースイッチもついているので最下行キーはレイヤーキー割り振りつつもプロファイル切り替えてゲーム時は通常キー割り当てたりスムーズにできるので、かなりありだよなと思います。もう一つ課題としては今回CNCでケース作ったわけですが高い。これは半分あきらめていて、じゃあこうしたらいいんじゃないかと提案してもそこまで劇的に変わらないのでという。
あと重さですね。カスタム勢からすれば軽い部類でしょうが、個人的にはある程度の安定”感”が出る重さは欲しいですが片手でサッと持ち上げられる程度の重さが理想です。今回LPケースはそこまで重くしたつもりはないのですがこれでもちょっと重い。アルミケースってアルミとはいえ結構薄くしないと重いのだなあと思うなど。これはPCもそうですね。ここは明確な課題です。後はうぬぼれですが個人的には満足です。そりゃ自分用に作っているのですからそうなのですけど。他の人たちには全く魅力的に映らないのでしょうけど、どうでもいい細部にどうでもいいこだわりが達成できています。
Nitingale B2を作り、60%キーボードも作り、メカニカルキーボードにはいったん満足しました。磁気キーボード作りましょうね、、、
-
25年11月 eイヤホン 天下一キーボードわいわい会 Vol.9 行ってきた
2025年11月8日、東京に出かけてきました。天キー9とついでにeイヤホンに新作の試聴という感じです。
えいや試聴
前回は帰りに寄ったのですが遠回りで面倒なのともう夜なので先に行きました。11時開店なのでそれに合わせて、12時過ぎまで1時間程度です。新しいのだけ聞こうと思っていたので一つ一つはそこそこじっくり聞くことができました。
試聴環境はyoutube music – スマホ – space – has-0です。adx7000だけは備え付けのferrumのシステムで試聴しました。
オーディオテクニカ ath-adx7000

![]() ATH-ADX7000|ヘッドホン:ワイヤードヘッドホン|オーディオテクニカATH-ADX7000の商品ページです。エアーダイナミックヘッドホン,“聴く”を超え、響きが時を満たす。音が空間に溶けていく、開放型の新次元へ。www.audio-technica.co.jp
ATH-ADX7000|ヘッドホン:ワイヤードヘッドホン|オーディオテクニカATH-ADX7000の商品ページです。エアーダイナミックヘッドホン,“聴く”を超え、響きが時を満たす。音が空間に溶けていく、開放型の新次元へ。www.audio-technica.co.jpオーテクの新作リスニング機ハイエンドですね。56万となかなかなお値段がします。
3000も最近のモデルですが7000のウリとしては新しいHXDTというドライバを使用しているようです。装着感は結構よかったです。オーテクノ開放型らしく300gを切る比較的軽量な設計と側圧も弱め、イヤーパッドの広さも普通にあります。ヘッドバンドもすっと装着しやすかったです。
音としては個人的にはそこまで刺さらず、値段的にも購入検討は無しという風でした。高価格機にありがちな音質のその先で僕の強みはここだぜというような個性的な主張はなく試聴レベルで性癖に刺さりにくく感じました。細かく見れていませんが音質的に明らかに気になる部分はなくいい感じにまとまっていると思います。
傾向としては低音の響きが強めでグルーブ感があり、他素直な出音と感じました。オーテクらしくTOA感のあるなり方です。3000を以前試聴したときはリスニング機としての色がありこういう味付けで売っているんだなというのが感じられましたが、7000はリスニング機のくくりではあるのだけどそこまで大味な色付けはなく感じました。
どちらかというと新ドライバのお披露目という様な感じが強いのかしら。これも人によっては一つのエンドゲームの形かなと思います。最新ドライバ+TOAなヘッドホン、金が無限に合ったらリファレンス機として欲しいところですが、56万クラスなので貧乏人の私には厳しいところ。
個人的にはオーテクのリスニング機はadx5000までのモデルの方が音作りとして好きだなと感じます。モニターモデルでも音質的には明らかに劣るのですがr70xの方がぐっとくるものがあります。セール来たらr70xをr70xaに買い替えよう、、ヤマハ yh-4000

![]() ヤマハ | YH-4000 – ヘッドホン・イヤホン – 概要ヤマハ独自の「オルソダイナミック™ドライバー」を搭載したハイエンドヘッドホンjp.yamaha.com
ヤマハ | YH-4000 – ヘッドホン・イヤホン – 概要ヤマハ独自の「オルソダイナミック™ドライバー」を搭載したハイエンドヘッドホンjp.yamaha.com私自身ヘッドホンとしてyh-5000seを愛用しているので、ヤマハの新作を楽しみにしていました。ので今回は4000と3000を聴きに来たと言っても過言ではありません。
公式ページにあまり5000seと何が違うのか説明もなく消費者に説明する気あんのかよと思います。
ドライバは同じものを使用していて、フィルターなど音響パーツを調整した製品のようです。価格ダウン分はケーブルやスタンド等を省いたことによるものでヘッドホンとしての製品価値は変わらず、廉価版ではなくチューニング違い品だと聴いた感じでも思いました。結論としては勝手に期待して聴いたわけですが、購入検討は無しでした。上述したようにチューニング違いであり、5000seを好んでいる私ですから当然ともいえます。
作りは同様ですから素晴らしいです。比較的軽量で側圧も強くなく、広いイヤーパッド、美しいデザイン。
サウンドは5000seと比べてだいぶすっきりとした印象で、全体にアタック感があります。熱量やパッションをより強調し、躍動感を高めた、密度感のある中域とタイトな低域を実現すると謳っているらしいので、そういうことを意図したチューニングを施しているのでしょう。一聴してこちらもヤマハらしさのあるサウンドで好きと感じましたが、聴いているとまあ自分には5000seがあるのでいいかなという風に思ってきました。基本設計は同一なので魅力的には感じる部分はあるのですけど例えばこれが5000seとして出ていたら買っていない気がします。高いしね
5000seは個性的で人を選ぶサウンドをしていますが4000は比べると現代的、なチューニングと思います。勝手な想像ですが、コミュニティからの5000seの評価が低いので再チューニングしたモデルなのかなと思っています。知らんけど
ヤマハ yh-c3000

![]() ヤマハ | YH-C3000 – ヘッドホン・イヤホン – 概要ヤマハ独自のアルモダイナミック™ドライバーとビーチ材ハウジングを採用した密閉型ハイエンドヘッドホンjp.yamaha.com
ヤマハ | YH-C3000 – ヘッドホン・イヤホン – 概要ヤマハ独自のアルモダイナミック™ドライバーとビーチ材ハウジングを採用した密閉型ハイエンドヘッドホンjp.yamaha.com4000と合わせて発表されてきた密閉型モデルです。こちらはドライバも異なり平面型でなくダイナミック型だそうです。
見てわかる通りハウジングにピアノ木材が使用されています。ヘッドバンドの設計や軽量さは開放型譲りです。装着してみて気づくのは異なるイヤーパッドです。密閉型なのでそうなのでしょうけれど、空間は狭く、外形も楕円形となっています。個人的には長時間使用できると嬉しいのでというところです。長時間使用していないのでわからないですけどね。
密閉型の高価格機自体が数少ないですが、そこまで密閉型だなあ、、ということを意識させないサウンドでした。ピアノ木材らしい響き方で、音の全体に太く芯のあります。それを除くとこれといった癖なくいい感じにまとまっています。何ならこの芯のある響きを楽しむのがこのヘッドホンなのだと感じます。
芯のある響きが楽しむピーキーなヘッドホンで他にはなく刺さる人には刺さりそうです。すごい。価格的にも個人的には買い足すことはない感じですが水月雨 illustrious
![]() MOODNROP ILLUSTRIOUS Flagship In-ear Monitor | MOONDROP Official Websitemoondroplab.com
MOODNROP ILLUSTRIOUS Flagship In-ear Monitor | MOONDROP Official Websitemoondroplab.com水月雨の新しいイヤホン。DF系の新作と聞いて楽しみにしていました。現在DF系をメイン使いするかというとしないのですけど、元々イヤホンもヘッドホンもDF系をメイン運用していた程度には好きですし、やはりこの音は興奮するんですよね。
一聴して気持ちよいですね。DFを謳っているf特なのはもちろんなのですが、出音がめちゃくちゃ素直で感動します。柔らかく全くとげがない。スペック上で低歪みを謳っているから~などとはあまり言いたくないのですが、低歪み感のあるサウンドでストレスレスで聴けます。
一般にDFは低音の量感が少なく受けづらいかもしれないですが、これはいい機種だなと思います。お値段は張りますけど。
欲しい。ここまで褒めておいて買っていないのは性癖に刺さるかどうかの話をしていないからな気もしなくもない。また試聴したいですね。hid-labs detect
 HID-Labs ゲーミングイヤホン DETECT | HID-Labs OnlineShopshop.hid-labs.com
HID-Labs ゲーミングイヤホン DETECT | HID-Labs OnlineShopshop.hid-labs.comデバイス周りで話題になっていたものです。ゲーム向けのイヤホンのようです。
まずeいやに言いたいのですけど、このモジュールというやつを隠して展示しているのやめて欲しい。知らずに試聴した人はそのまま聴くだろうし、それで壊されてもba直結で展示している方が悪いですって。そもそもモージュールは絶対つけてくださいって言ってるのに駄目だろう、、、。ただ試聴したいだけなのに声かけて待たせてがさごそするのあほらしいし。
耳にはめてみて、非常に小さくておさまりがいいですね。人によっては寝ホンとして違和感ないレベルの小ささでいいなと思いました。
細いケーブルも売りのようで、私も太いケーブルは取り回しがめんどくさいのでいいなと思います。タッチノイズがやや気になりました。タッチノイズへの言及は2種類あって、大きさと固さです。タッチノイズは普通に小さいと思いますが布巻と比べてやや硬く感じます。耳に突っ込むタイプは結構シビアなので難しいですね。
etymotic researchに似ているなどとはたびたび言われていますがそこらへんも見てみました。まず外付けモジュールのネットワークですが、抵抗2コンデンサ1で素子構成はER-4Bと同様でしょうか。また筐体の外見も似ています。こういうところを見てそういう意見があるのだと思いますが、detectはER-4Bクローンではありませんでした。まずコンセプト的に違うのですよね。
hidさんの記事でFFカーブのイヤホンがいいと言っていますがER-4BはDFカーブとして知られていますし、個人的意見としてそもそもER-4Bはバイノーラル音源向けであってFPSには向いていないのですよね。
音を聞いてみると、非常に低音の量感が抑えられています。低温が控えめと言われているER-4S, ER-4Bともに同様の100ohmのイヤホンですが、それと比べても明らかに低音が少なくピーキーな周波数特性をしています。ER-4Bと明らかに異なる周波数特性をしている時点で、そのクローンではないというわけですね。
おなじ1ba100ohmでどうしてここまで低域の量感が異なるのか?と考えてみるとまず使用しているドライバが違うとか?ほか、聴いた感じとしては筐体の音響設計として低音を抜いているとも感じました。想像ですけど。
詳細は実際の測定値など公開されていないのでスペックはわかりませんが、トランジェントがいいのでゲームに向いていると言われています。これはゲーマーへのお節介ですが過渡特性はイヤホンだけでなくアンプのドライバ制動力も大きくかかわるのでそこを活かしたいというゲーマーは制動力に優れたアンプを使用することをおすすめします。
天キー9
普段全然外出しないので会場に着いた頃にはすでに大分疲れていました。人もだいぶ多かったので写真に収められていないものも多い気がします。人の途絶えない人気卓すげえ
まあ記録です記録zenaim
今回もzenaimさんがいました。
zenaim2、打鍵感が良くなったという人もいれば変わらないという人もいて、実際どうなんと思っていたので触れてありがたいです。
私としてはどちらも正しい意見だなと感じました。まず前提情報としてzenaimtklはカッチャカチャでオタクでなくてもやべーうるせーという感じです。フォームを入れたらしいのですが、そのおかげで詰まった感じで反響音は明らかに減っており3000円の中華キーボードのようなカチャカチャ音はなくなっていました。反響音が無くなったという意味では明らかに快適になっていますが、フォーム入れただけですから劇的に変わるわけもなく、そもそもzenaimのアルミプレートにzenスイッチの打鍵感が嫌いという人にとってはナシなのでしょう。
私は結構いいじゃんと思いました。これならまあありだと思います。正直市販の磁気キーボード打鍵音うるさいの多いので全然ありだと思います。価格も3万円になりましたしね。自宅で使ったらまた違ったりするのだろうか、、
音量でいうならカスタムキーボードの方がよほど、意図的に大きな音量は鳴らしていますしね。カッチャカチャがなくなっただけで十分でしょう。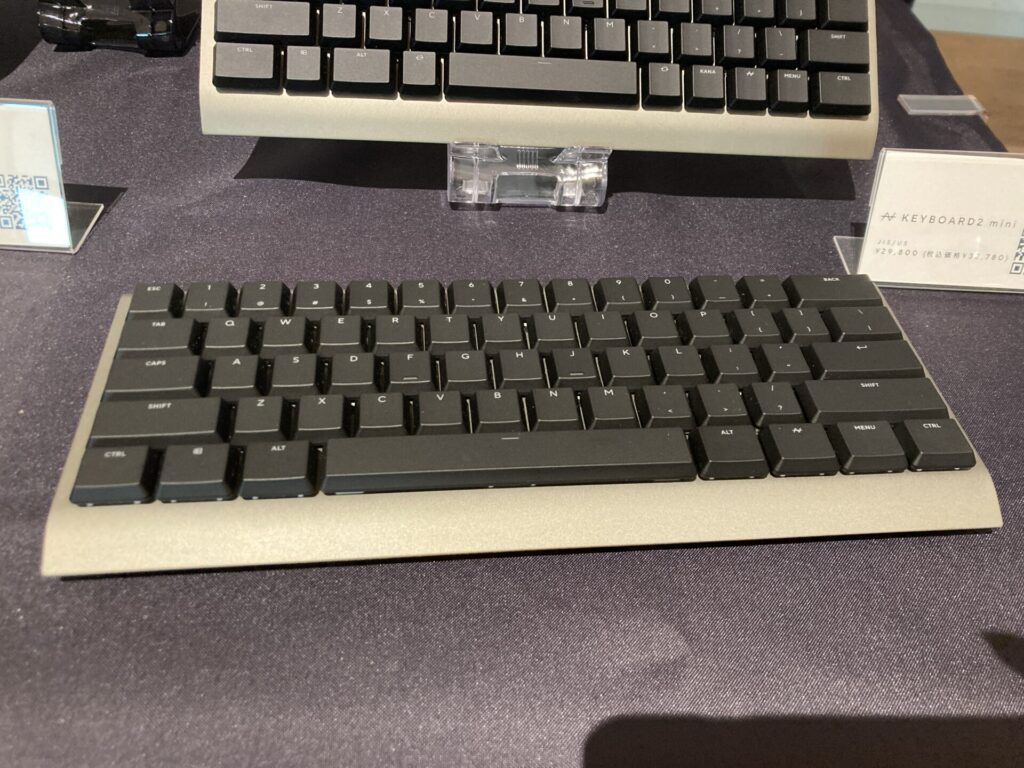
何やらかっこいいアケコンもありました。

見慣れないものがあるなと思ったらMX形状のスイッチとそれに対応したオリジナルキーボードのモックがありました。
磁気スイッチではタイトさを求める人が多く何やら色々あるようですが、zenaimは板バネでステムがハウジングに突っ張るような方式のスイッチを設計し、特許出願中のようです。
大事なのはタイトさではなく、キーのステムが不安定なことですので、軸のタイトさ以外にも使用するばね等でも変わってくるところです。東海理化は根本的な不安定さを消すような設計をされているのですね。
実際触ってみて、ブレ自体は小さいもののタイトさに全振りでスイッチとして微妙なスイッチの方がブレは少ないです。ですが軸の不安定さがありませんので、こちらの方が本質的だと感じます。フィーリングとしてはよかったです。
意図的に接点増やしているわけですが返りのフィーリングが悪くなったりはしないものなのだろうか。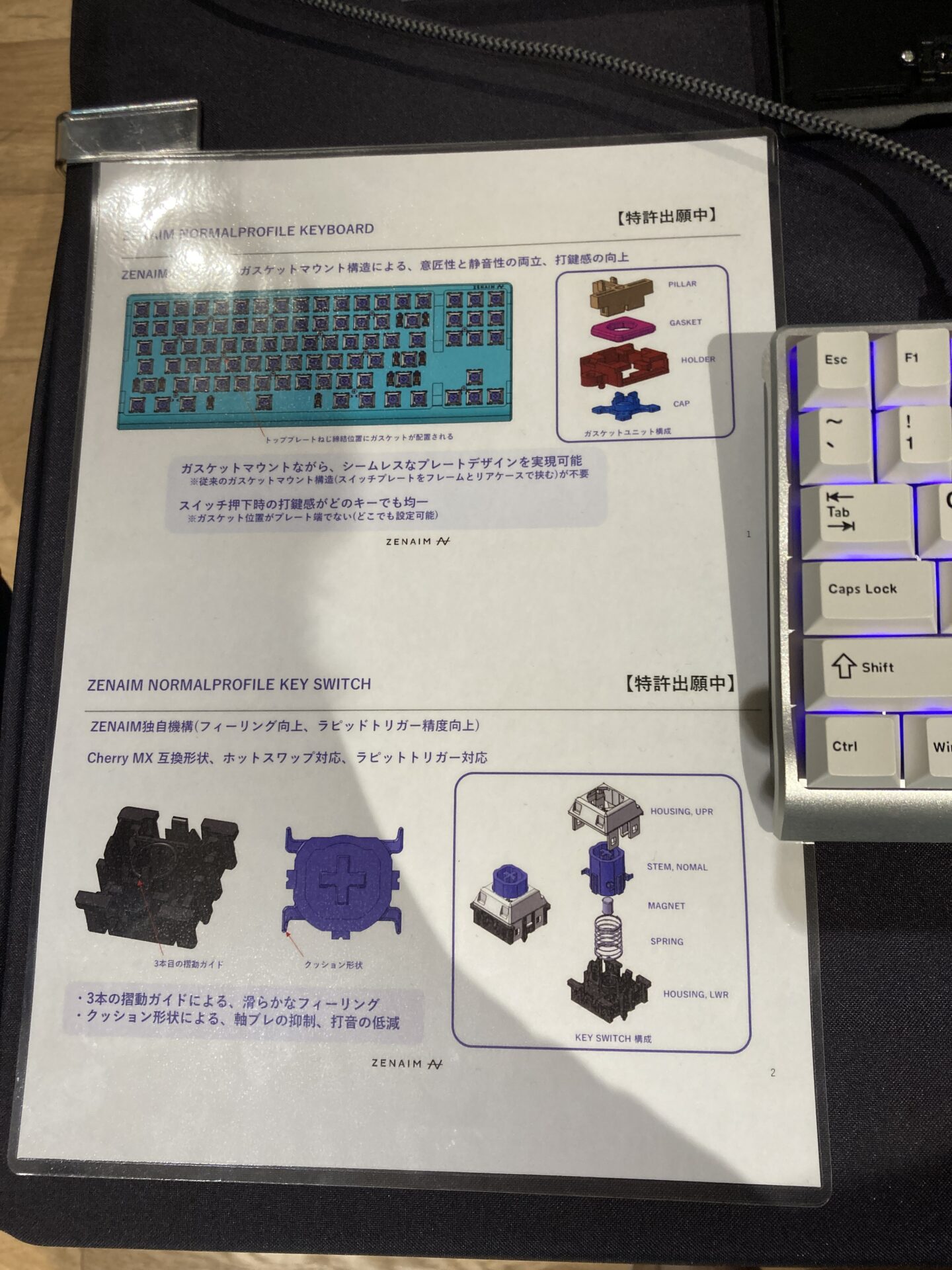
マウント方法も独自のガスケットマウントを採用し、特許出願中のようです。これだとベゼル不要で保持できるのでよい感じです。こういった方式はメカニカルだと厳しいところがあり、磁気ならではであったり事業として行っている所の強みが見えます。
スイッチにしてもマウントユニットにしても独特の構造をしており、東海理化としての他業種のノウハウが詰まっていそうです。説明いただいたスタッフも今までそういった部分に携わってきたプロだそうで強い。
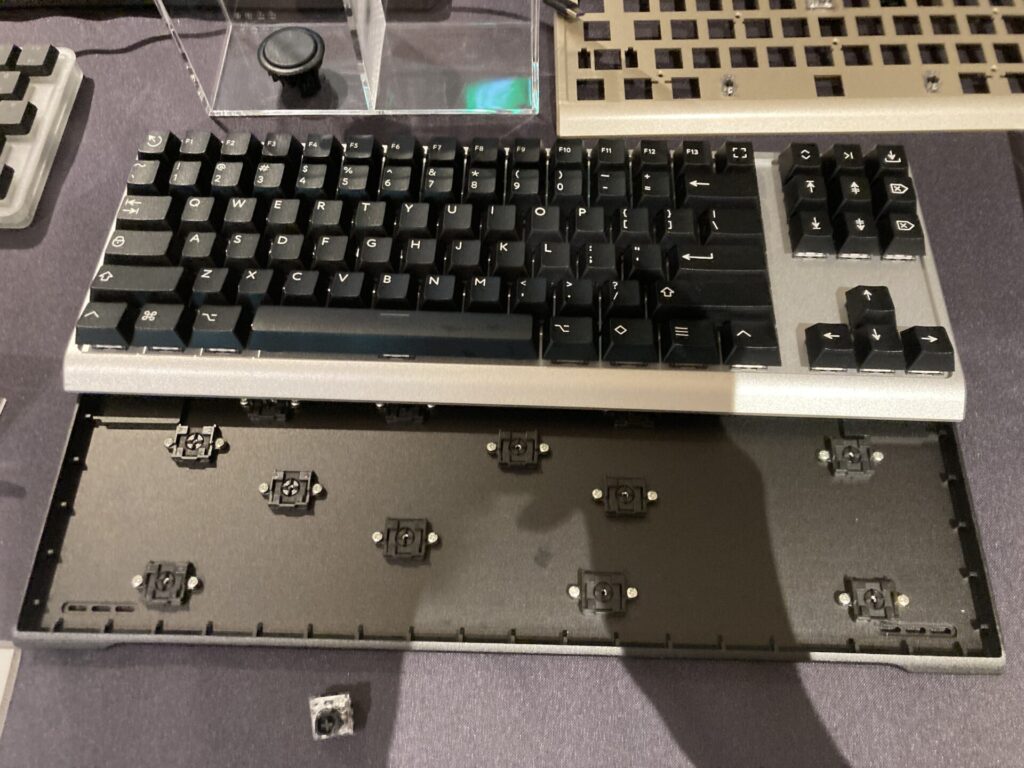
マウント構造の工夫もあり、zenaimらしい外観に仕上がっています。
プレートは据え置きのアルミ、ただintegratedのように見えてガスケットマウントというわけですね。
打鍵体験は普通によさそうでした。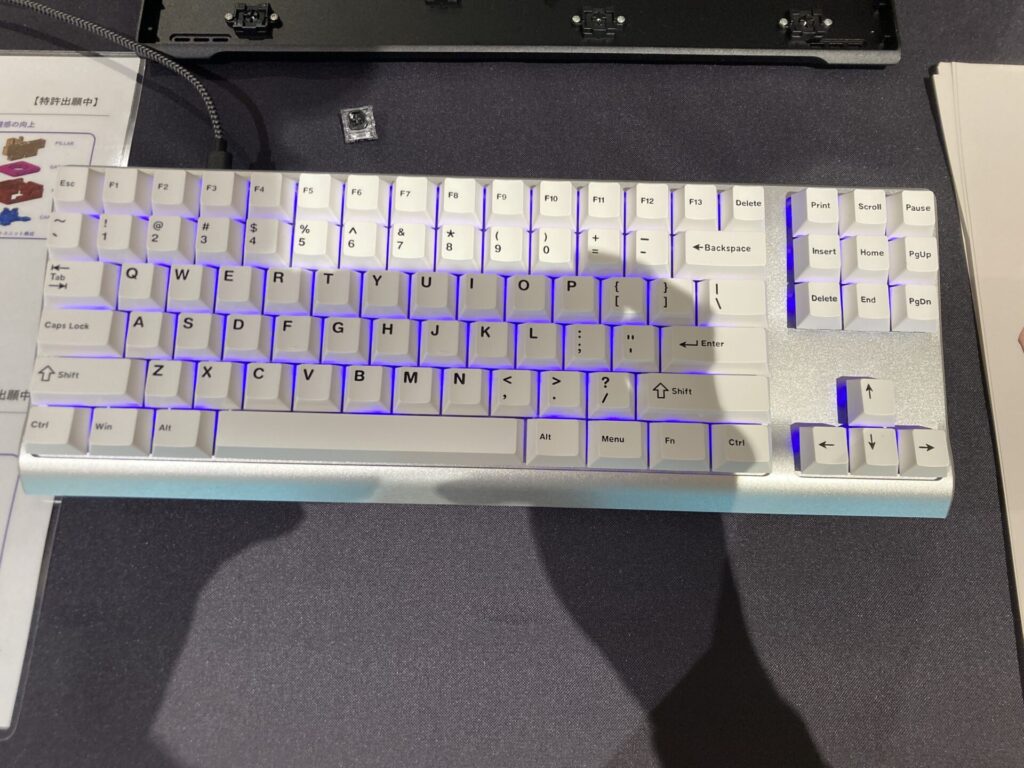
背面を見てみるとチルトスタンドがついています。ということは底面プラスチックかな?と思いきや、ボトムケース、チルトスタンド、すべてアルミパーツです。フルアルミケース+チルトスタンドはなかなか見ないので珍しく、特徴的です。質感的にもフルアルミにこだわられたとのことです。
価格は既存製品と似たところで考えているとのことで驚きます。まあ中華を見てしまえば当然だろうむしろ高いぐらいだとも言えてしまうかもしれませんが、高そうだと感じていたので3万円台でてにとれるとしたらいいですよね。zenaim5万円はなかなか強気でしたからね。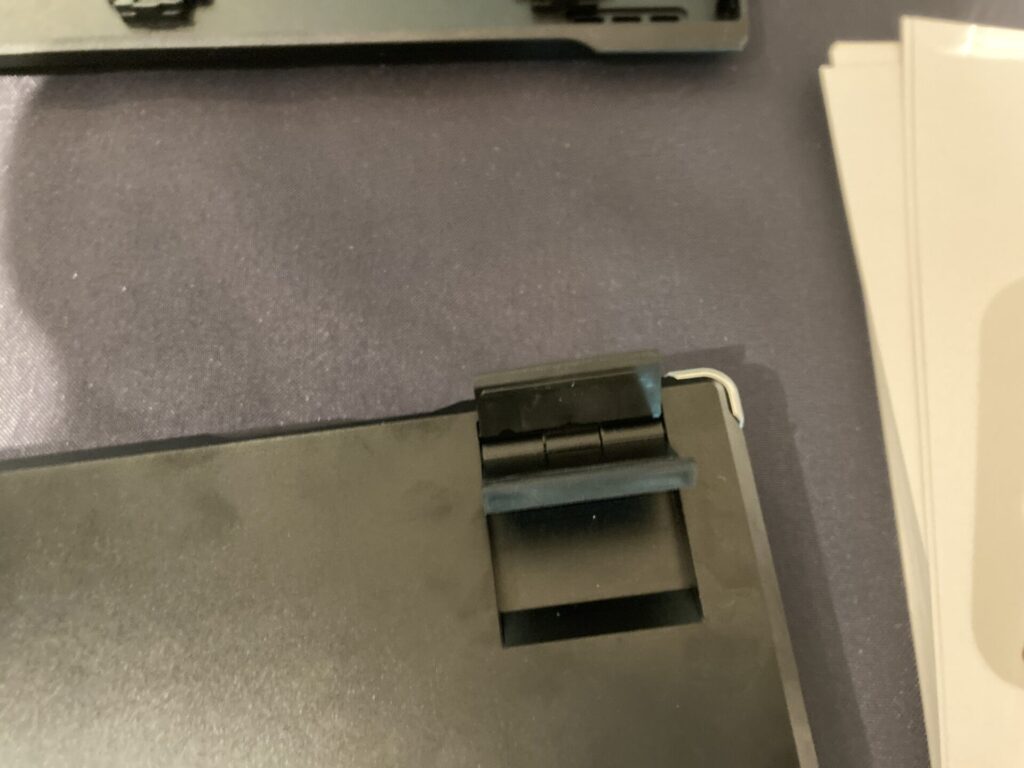
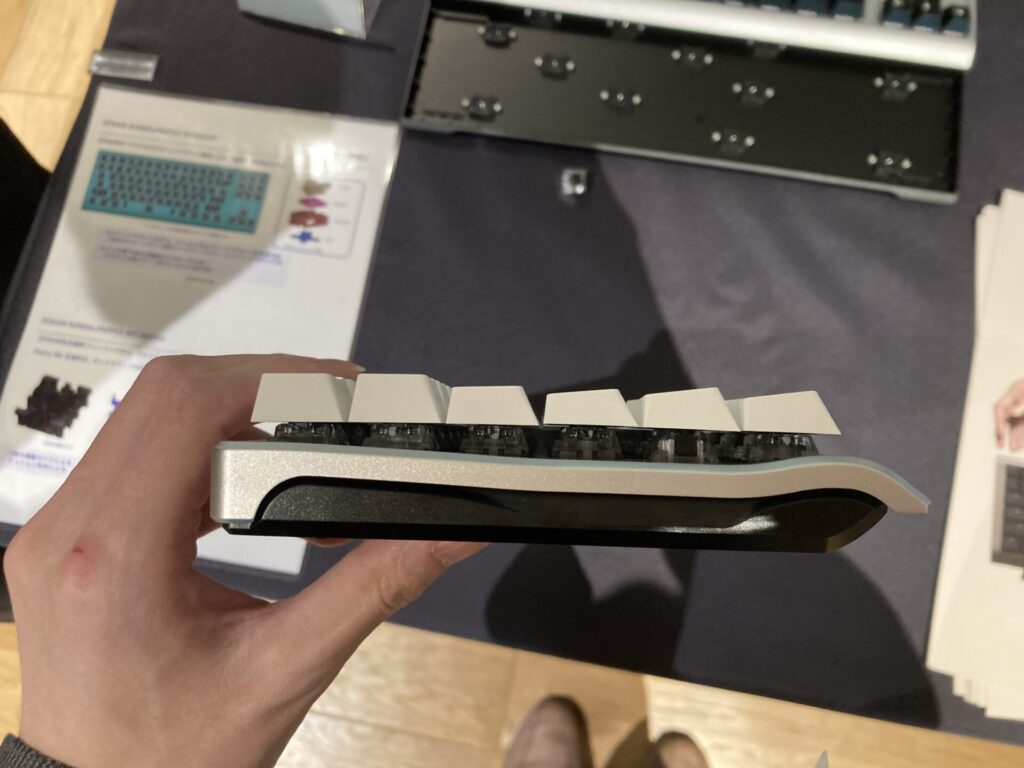
側面。
他基板スペックについて聞いてみたところイマドキなスペックにするということでzenaimから一新されそうです。
個人的にはzenaimの妥当な、設計が好きだったので事業ですから仕方ないところはあるのでしょうがデバイスオタクを向いた方向にかじを切るというのは意外なものでした。
一方でzenaim kbdとは全く異なる方向性のものを作るということはラインナップが拡充することですしとても意欲的だなあと感じます。ショートストロークなzenaim kbdシリーズは完成したのでしょう。今後の動向に注目です。気になったところをつらつらと独り言。
独自形状スイッチによるイイ磁石は使えなくなるよなあとはいえキーキャップあれしかないのはきつかったけれど。
8k対応したらスキャン方式変更で消費電力他社並みに増えるなあ(それでも常識的な範囲でしょうが)
フルアルミケース、ガスケットマウント、あたりは採用することによるモノとしてのメリットはなく思うのですけれどマーケティングとしての面が強いのでしょうか。メカの人のこだわりや技術はそれはそれとして素晴らしく思いますが。
デッドゾーン短くします!って仰られていて、いまだにアホにデッドゾーンどうこうを言われてるのかわいそうだなあと思った。
数年いろいろなフィードバックから新作はよくもわるくもだいぶユーザーの意見に目を向けたように見える。だいぶ数年でゼンエイムさんの考え方変わってそう
まともな国内設計というだけで価値があるよほんとに。新しいスイッチ欲しいしショートストロークスイッチも別売りしてほしい。企業
keychronの左手デバイス。ごついデザインです
トラックボールデバイス。ブラッシュアップしたものをkeybchronで出すよう
be quietキーボード。丁度発売開始したそう。cpuクーラーのイメージですが、デバイスも出すのですね。
テンキーや上部のメディアパッドを左右に移動して装着できて面白い。スイッチも自社ブランドの静音スイッチだそうです。クリエイター向けな感じ、さすがに値は張りますが質感よいです。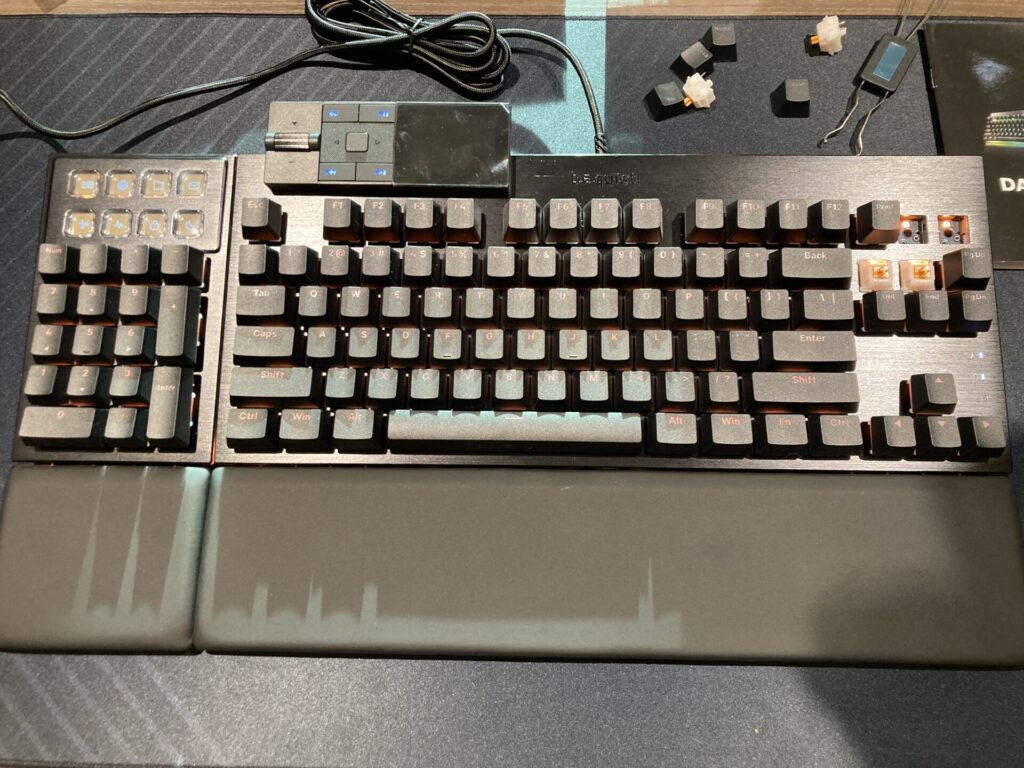
リベルタッチさん。前回ES版を販売していましたが、今回聴いてみると量産を目指しているとのこと。
ショートストロークなモデルがありましたが、押すほど荷重が弱くなるそうで、タイピングしてみると、低荷重ながら返りがよく、高速タイピングにストレスがありませんでした。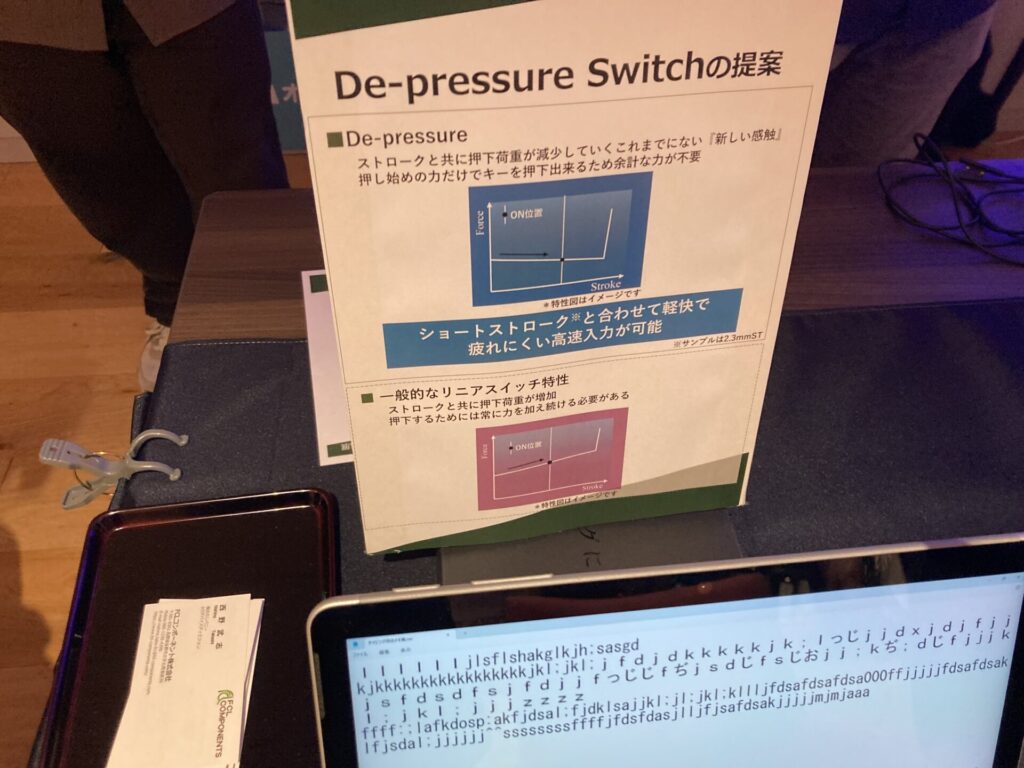
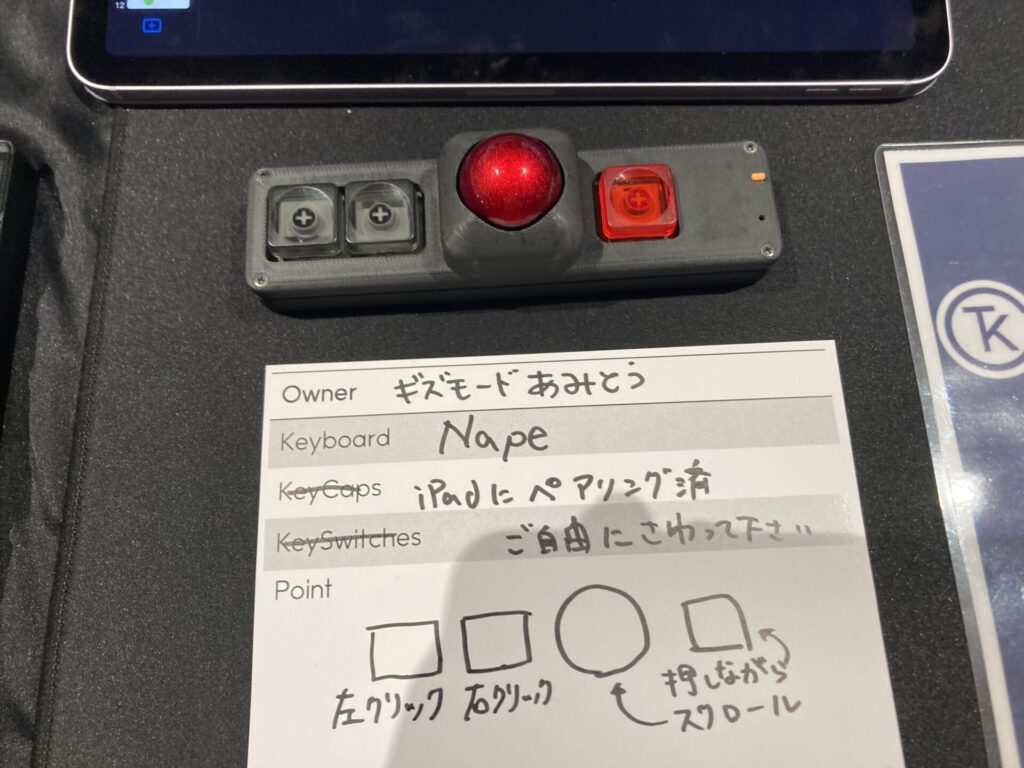
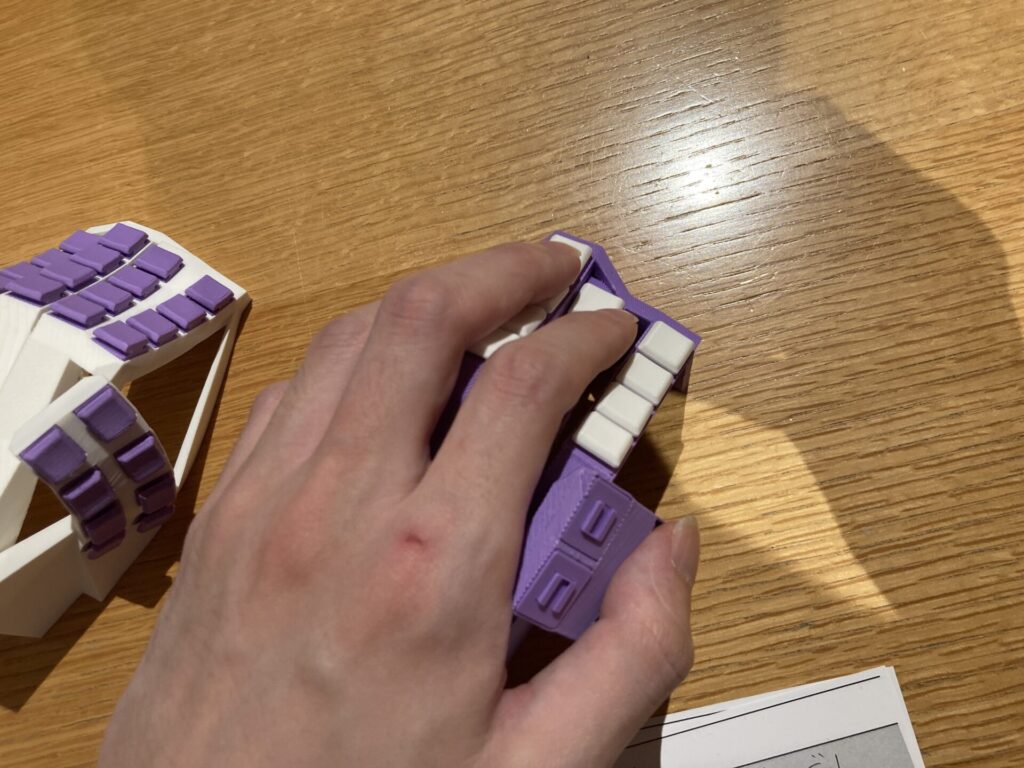
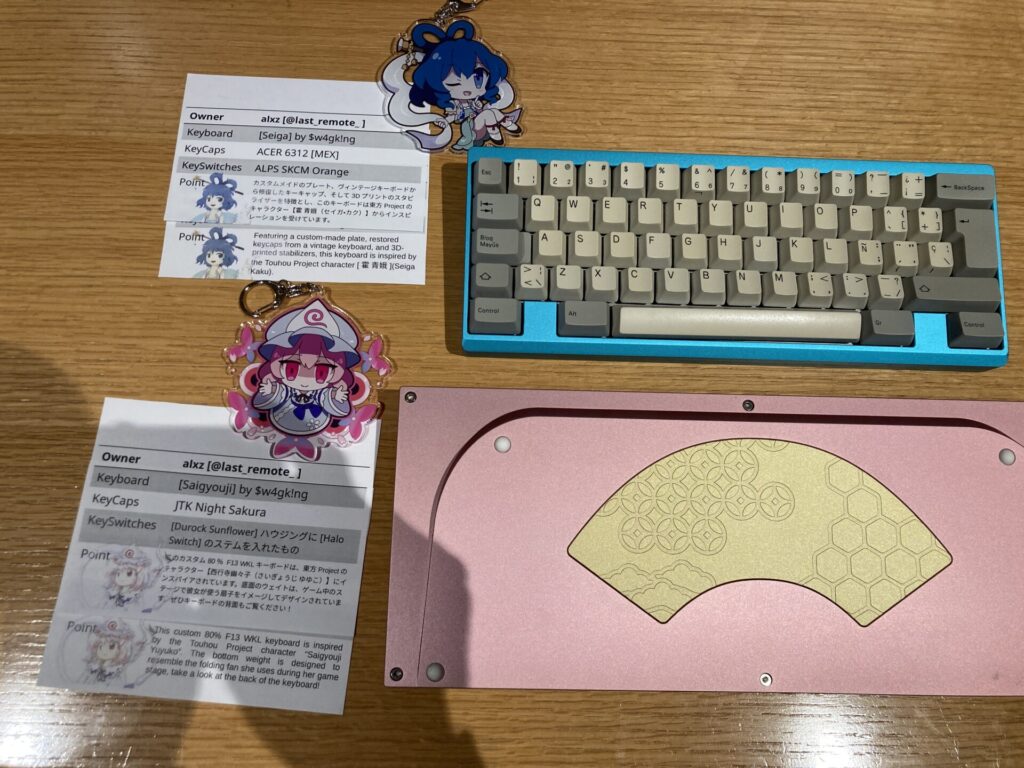
snugon
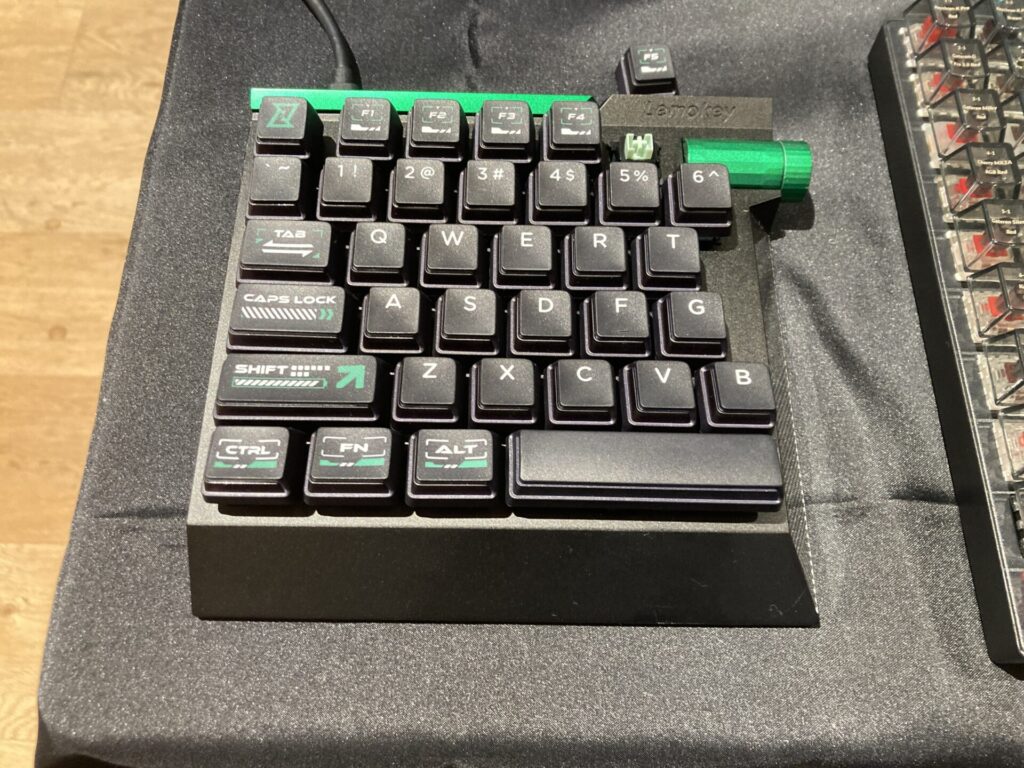
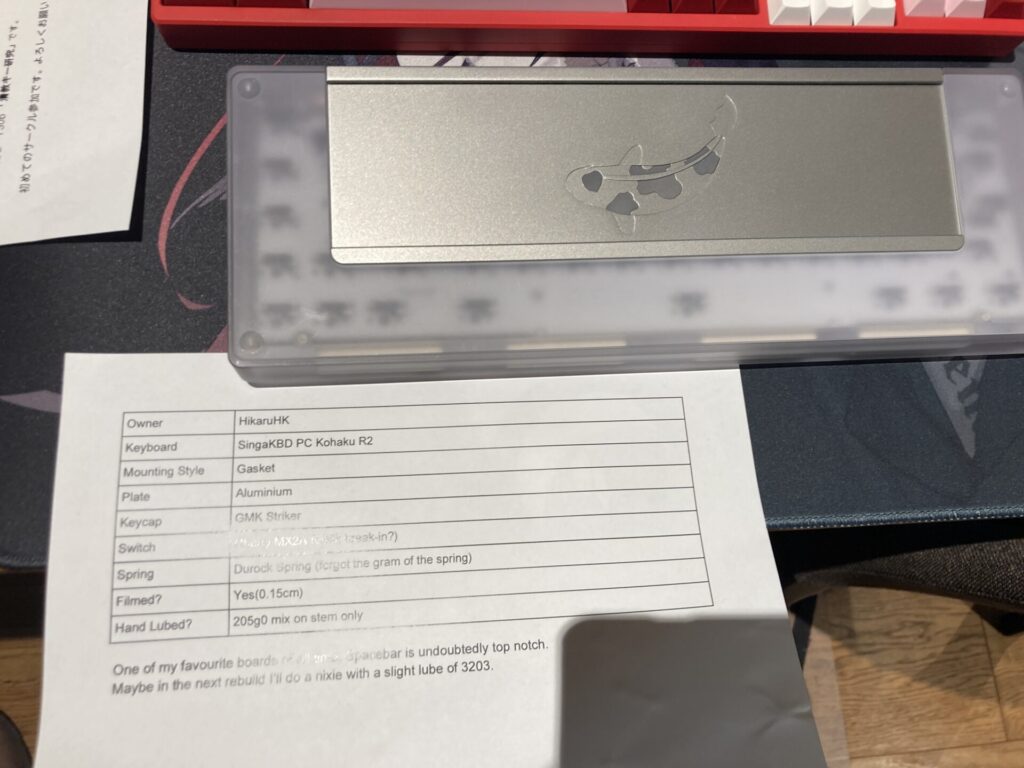
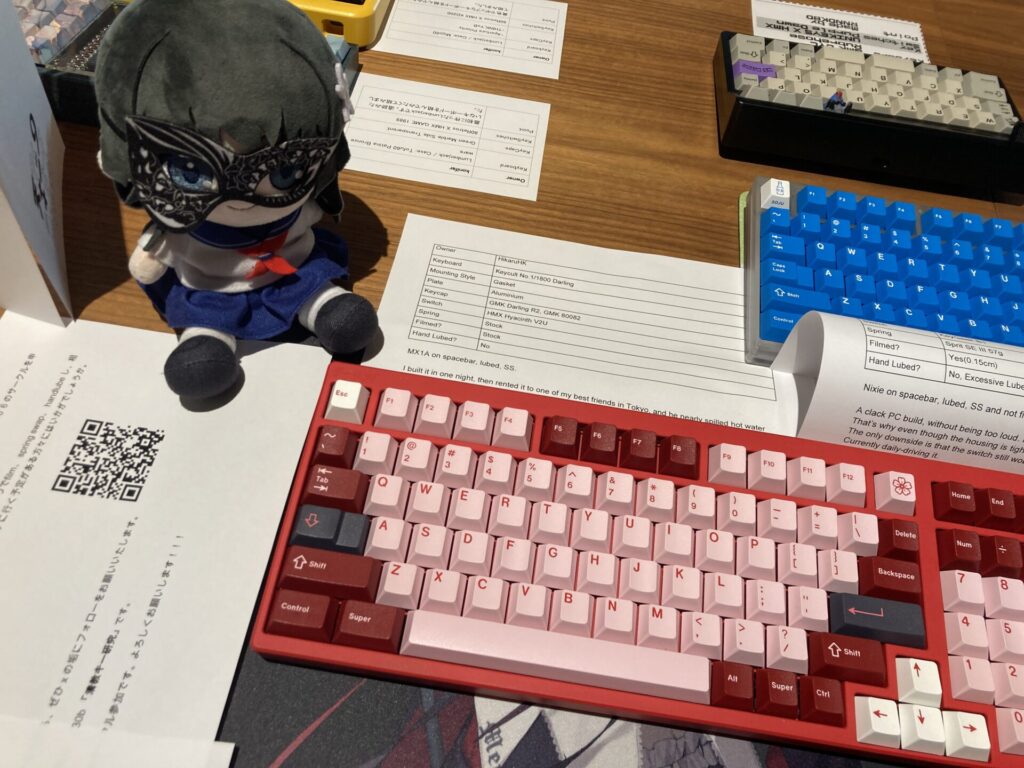
snugon 西出さんのマウスMO1
ついったで拝見していた方です。最初shugonだと思っていて以来しゅごーんと呼んでしまっている私がいます。
各指に2キーのボタンが割り当てられています。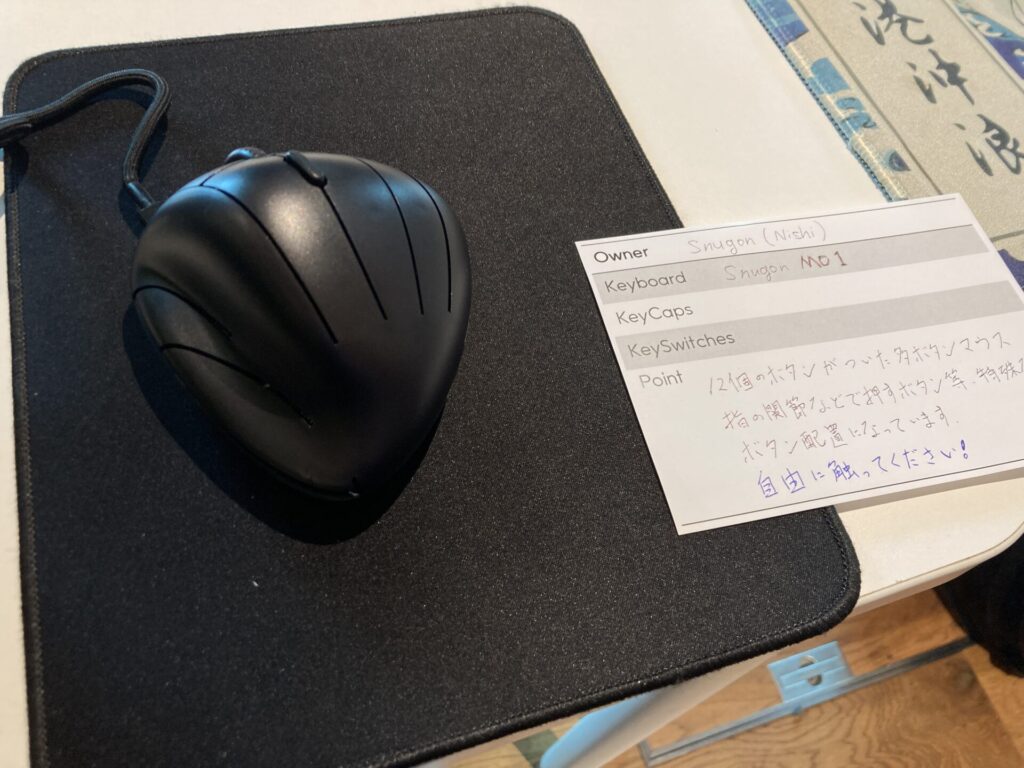
射出成型で作られていてとてもきれいで肌触りの良いシェルでした。スイッチは静音タクトスイッチで、静かですがマウスとしてのフィードバックはそこそこです。とはいえ多くの静音マウスはこのスイッチを使用していますので一般的に問題はありません。
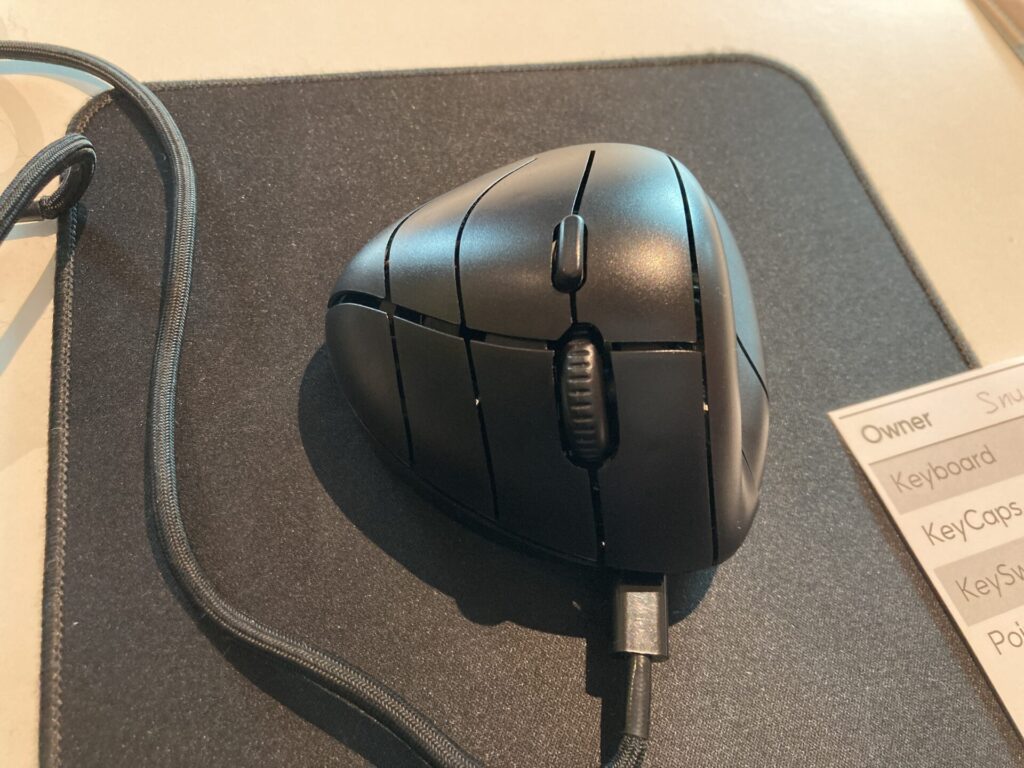
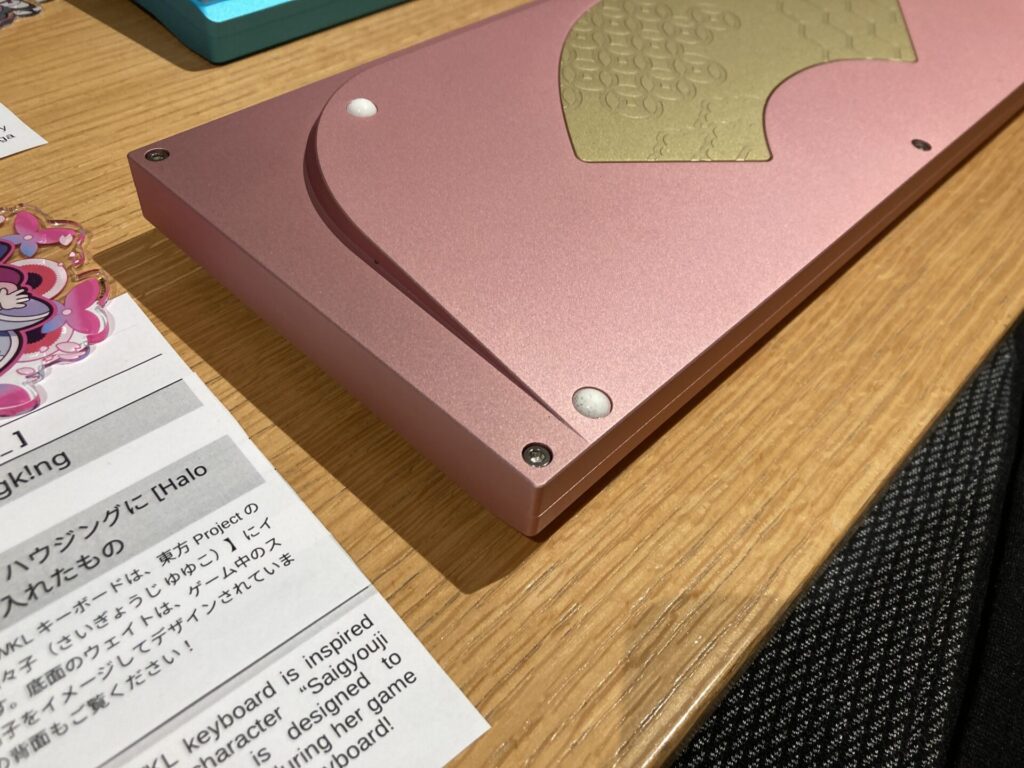
底面から見るとおにぎり型です。
ガジェット界隈で話題になっていましたが、無線だったらなあと言われていましたね。無線版の設計に着手されているそうです。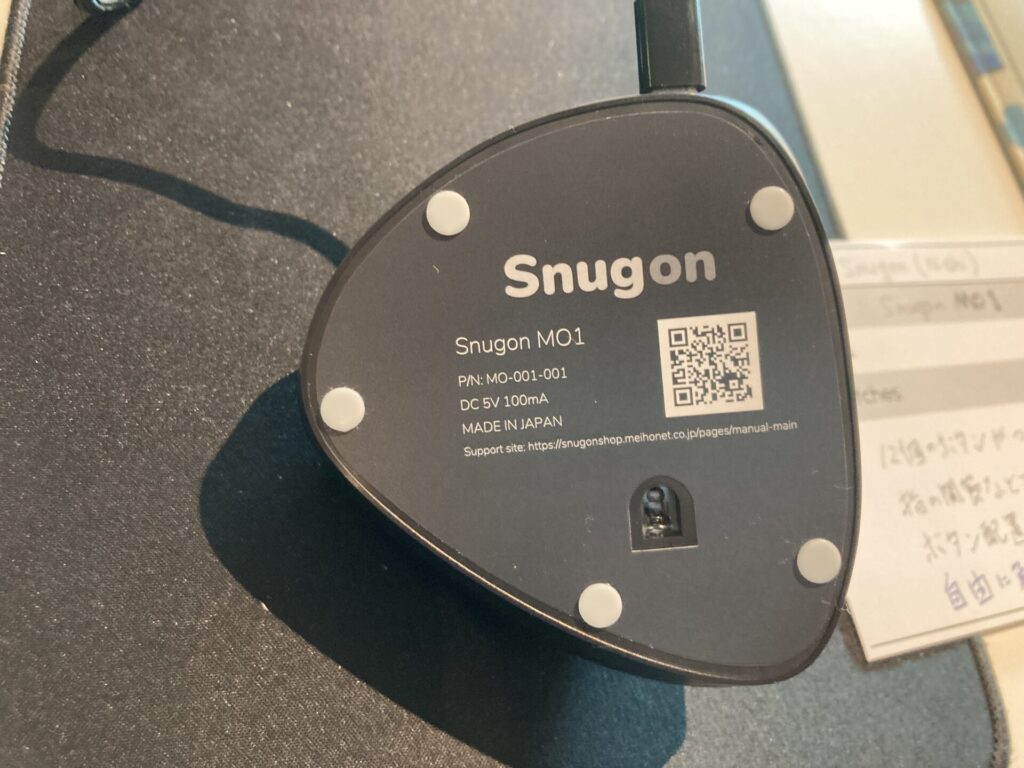
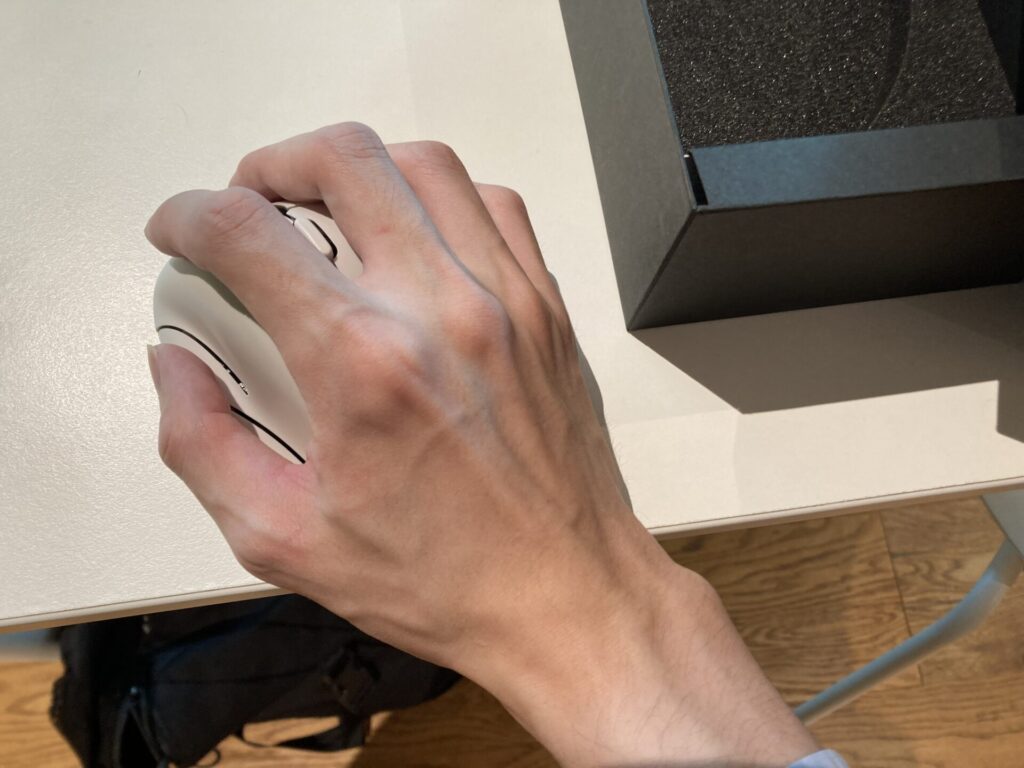
80gあるようですが、持ってみると実数値ほど重さは感じません。指先だけでなく指全体とでホールドしているためでしょうか。フィット感があります。
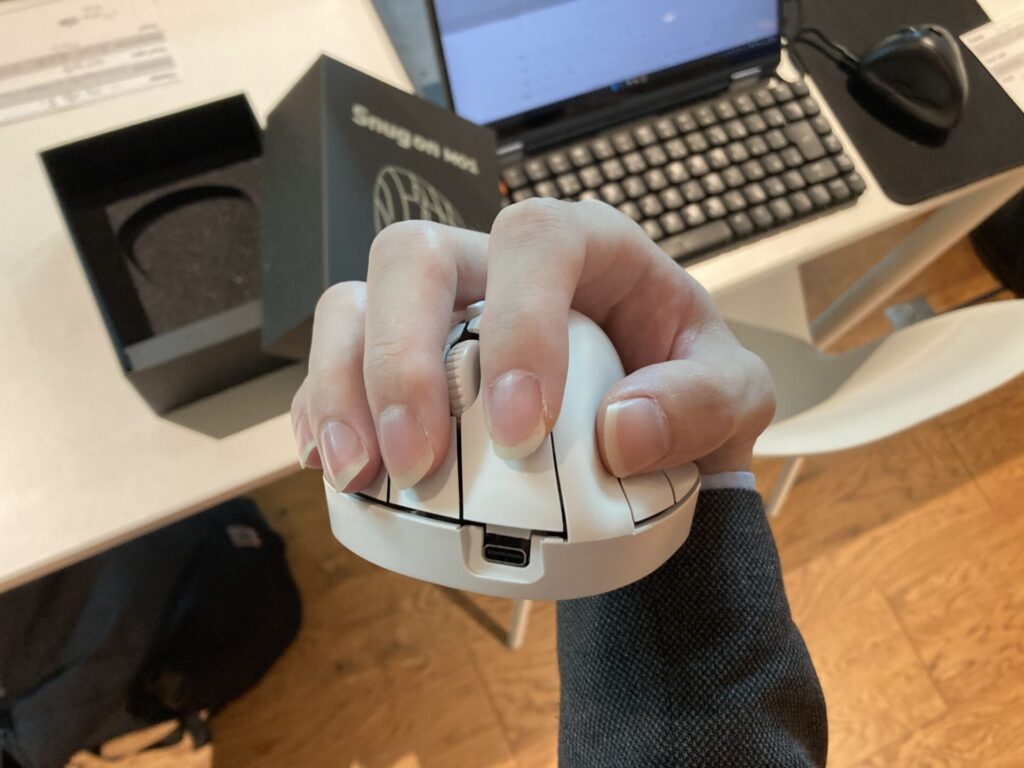
各ボタンへのアクセスはスムーズで、押し間違いは発生しにくく思いました。慣れは必要でしょうがマウスで多数の入力を行う場合よさそうです。
担当者さんにMO1に関するお話聞くことができて、大変興味深かったです。
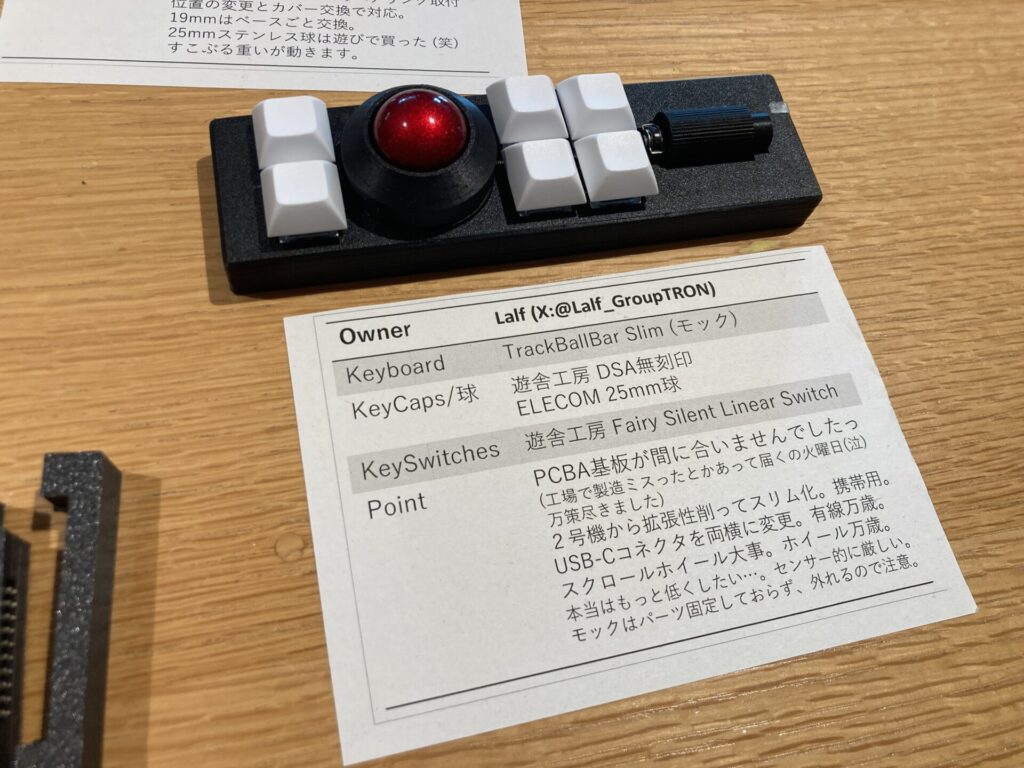
ポインティングデバイス、異形
トラックボール2個付きのマウスでしょうか。シェルと一体型で多数のボタンも備えています。

背にはディスプレイ?も備えています。独自の形状をしていて面白いです。
こちらは左右対称のトラックボールマウスのモックだそうです。左右対称が好みということで、これまた既製品にないデザインだなと面白く感じます。
他スムーズなボール保持についても考えているそうで、試させてもらいました。
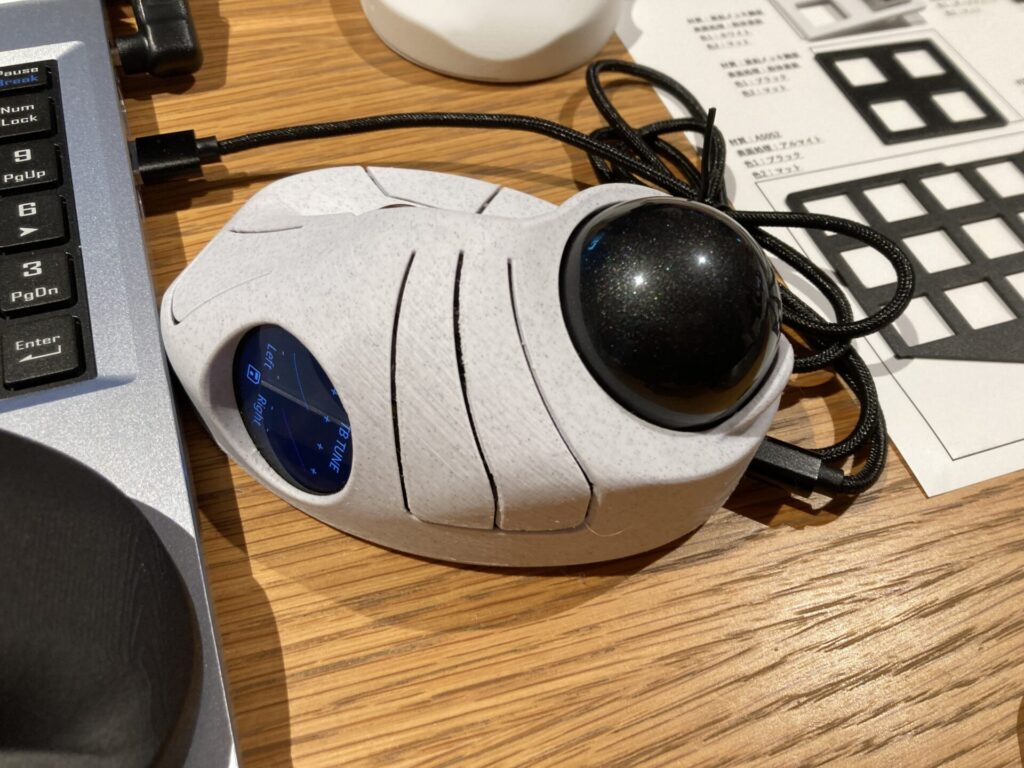
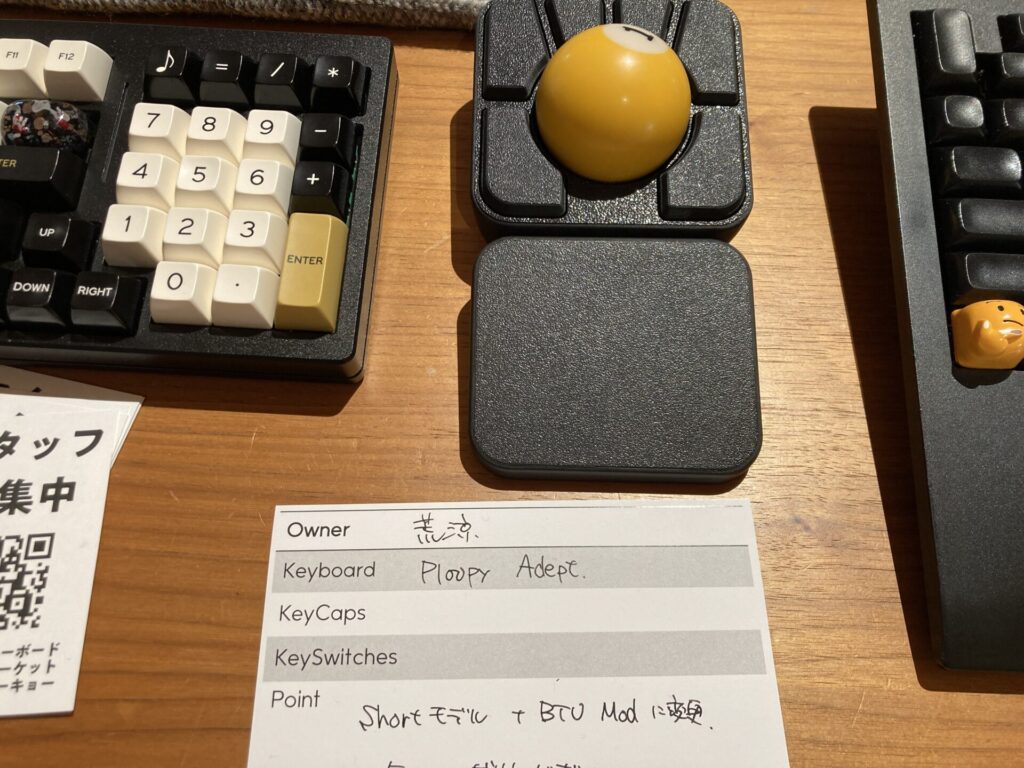
ploppyのトラックボールマウスでしょうか。コンパクトながら大きなボールに6ボタンあり、フィーリングもよかったです。
ボールトリングにスイッチ、エンコーダもついています。メカメカしさがあります


ガンダムモチーフのarm raker mouseだそうです。見た目から圧倒されます。

大きな本体がトラックボールで、ボール内に各種ボタンがあります。

土台はマウスセンサーが




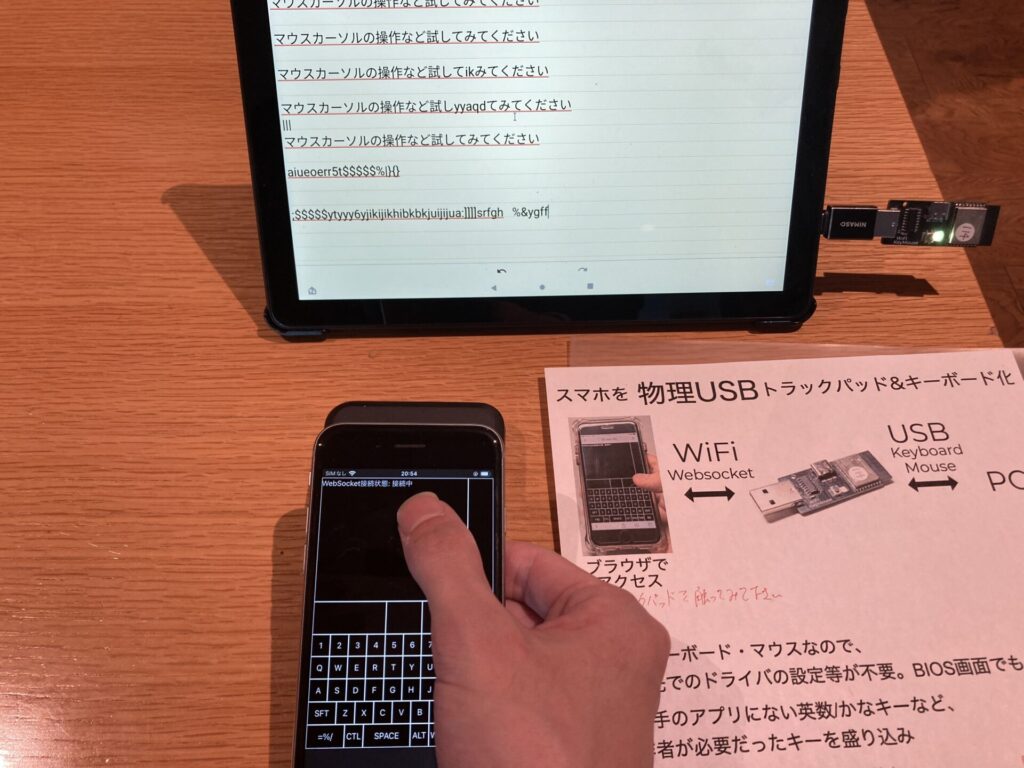
スマホトラックパッドだそうです。マウス操作キーボード入力
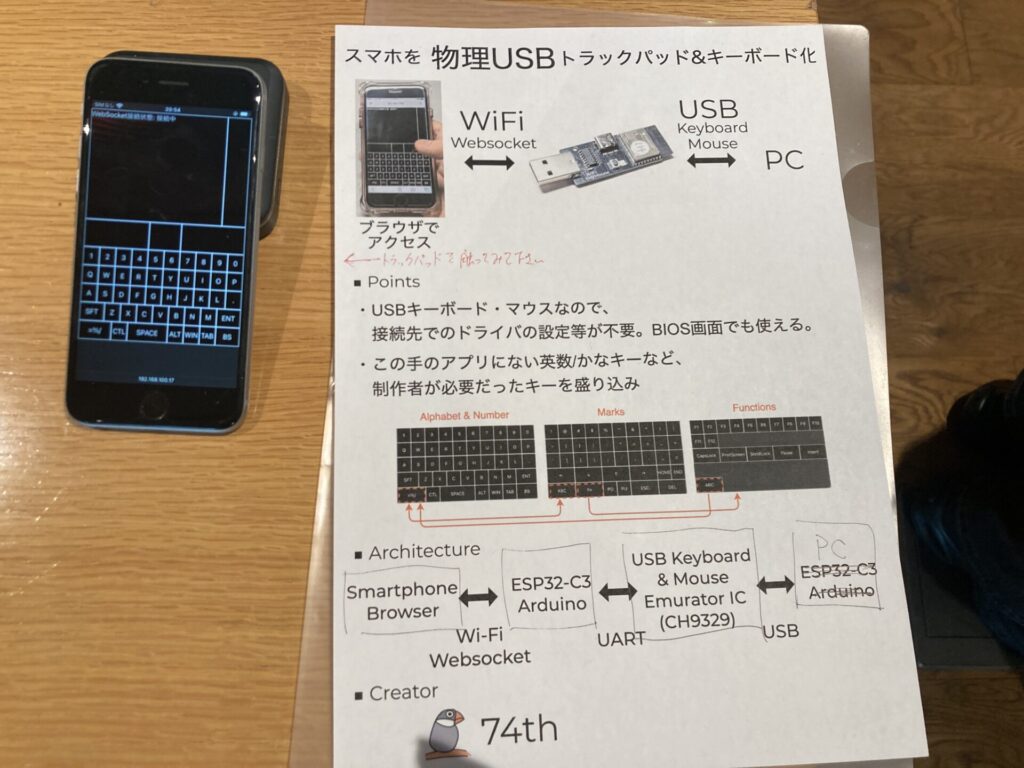
使い慣れたスマホですからかなり操作しやすかったです。机に向かわず操作するときなどかなり快適そうです。
modマウスですね。
人に合わせたデバイスを設計できるよう。おもしろいです。
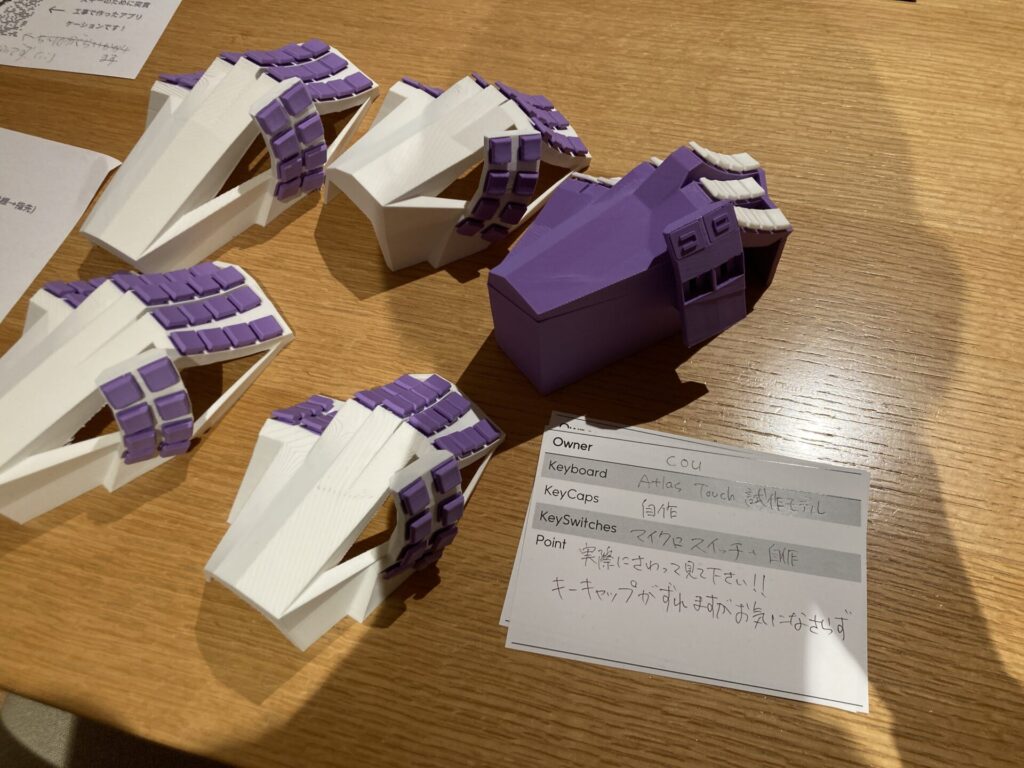
スイッチはマイクロスイッチを使用しています。

トラックボールデバイスのよう1台でいろいろできそうです。
パンタグラフな感じのスイッチがついています。新しいロープロスイッチのやつでしょうか。
ケースがあったら握りこむような形状になるのでしょうか。
トラックパッド ノートパソコンの感じで使えました。

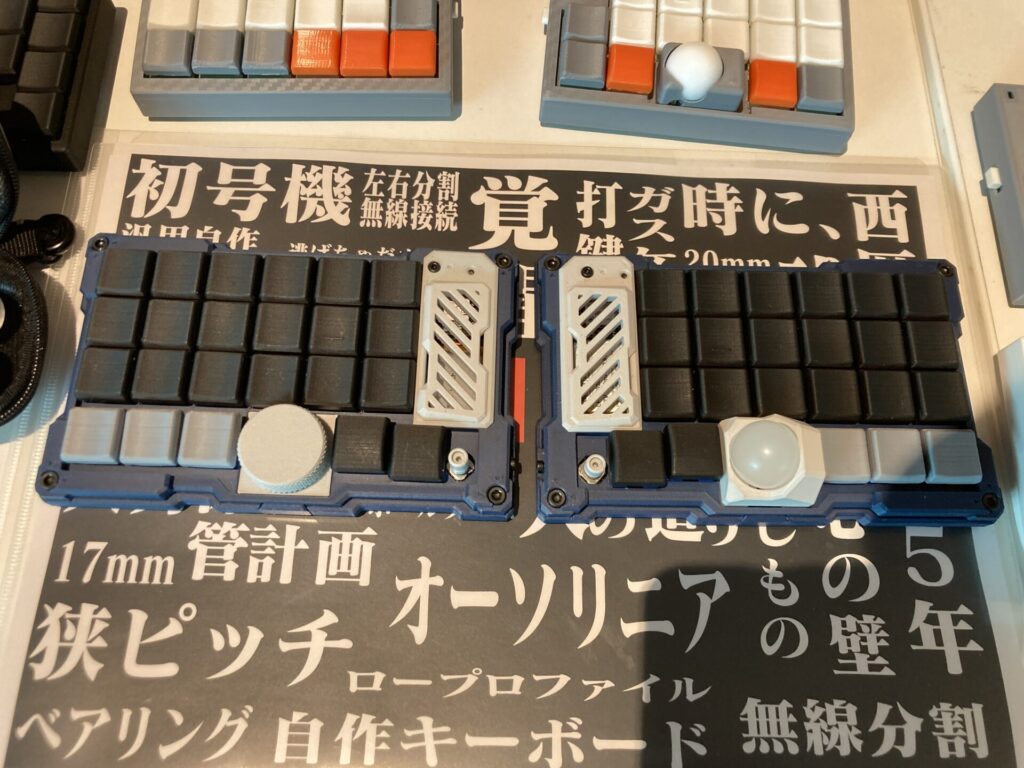
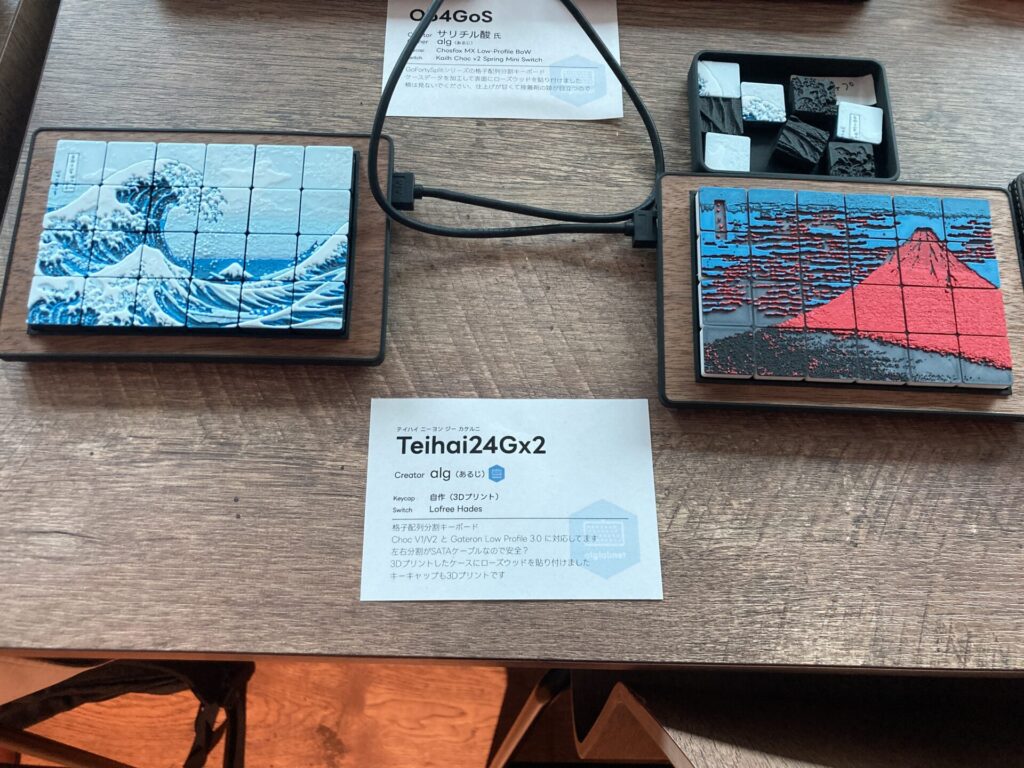
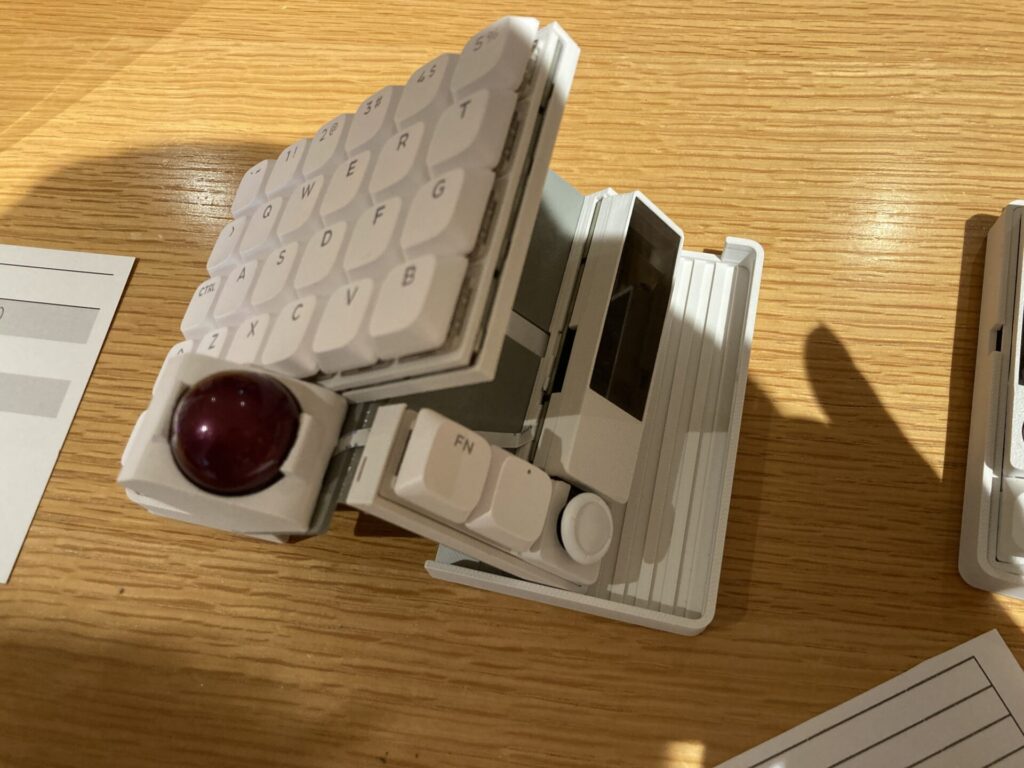
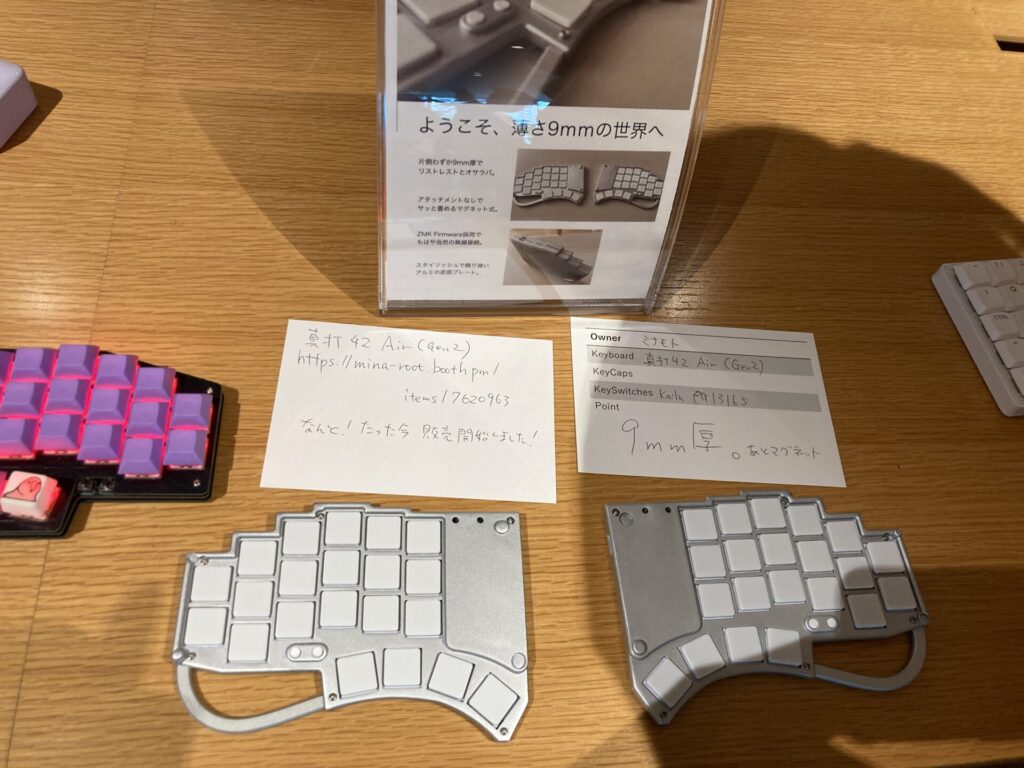
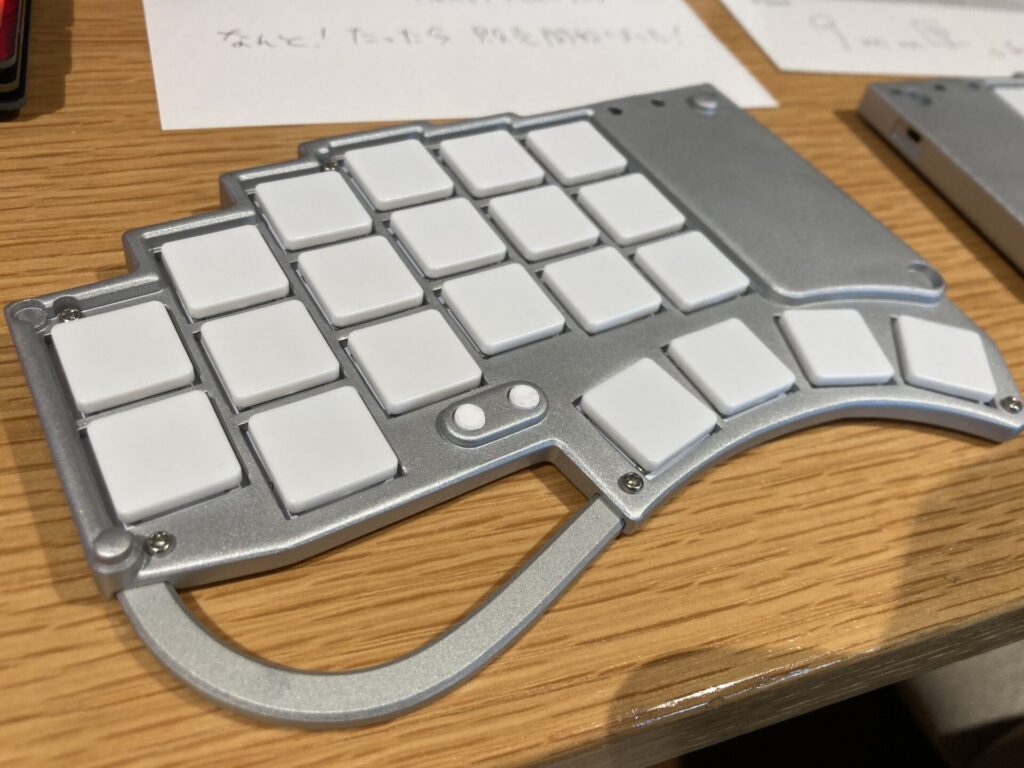
fdm、分割、無線、トラボなど
ついったで観測していましたメカブキーボードでしょうか。メカメカしさがありfdmであることを逆に生かしていますね。様々なモジュールが装着できそうです。この薄さにいろいろ取り付けるのはなかなか設計が難しそうです。すごい
同じデザイナーの方のlotus配列だそうです。
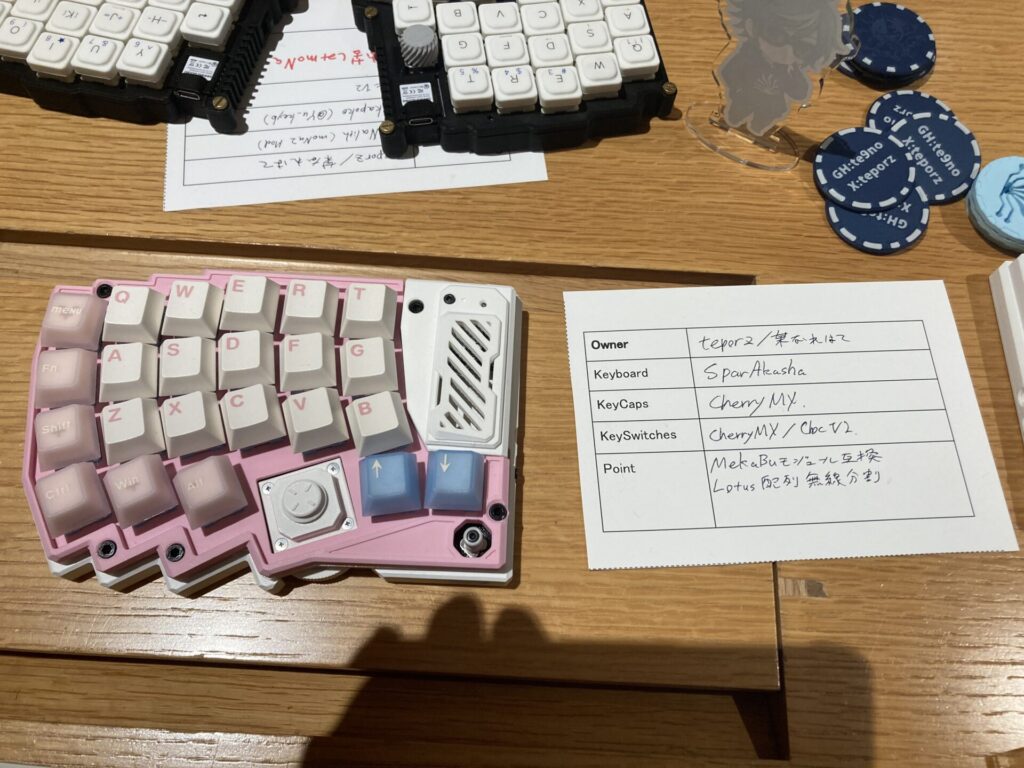
こちらもlotus配列。シックなデザインです。
こちらも。lotus配列人気のようですね。トラックボール付きでまた異なった印象のデザインです。
lotus考案者の方のキーキャップのようです。手磨きだそうです


lotusキーキャップに合わせたケースを設計されたようです。揃っていていいですね。
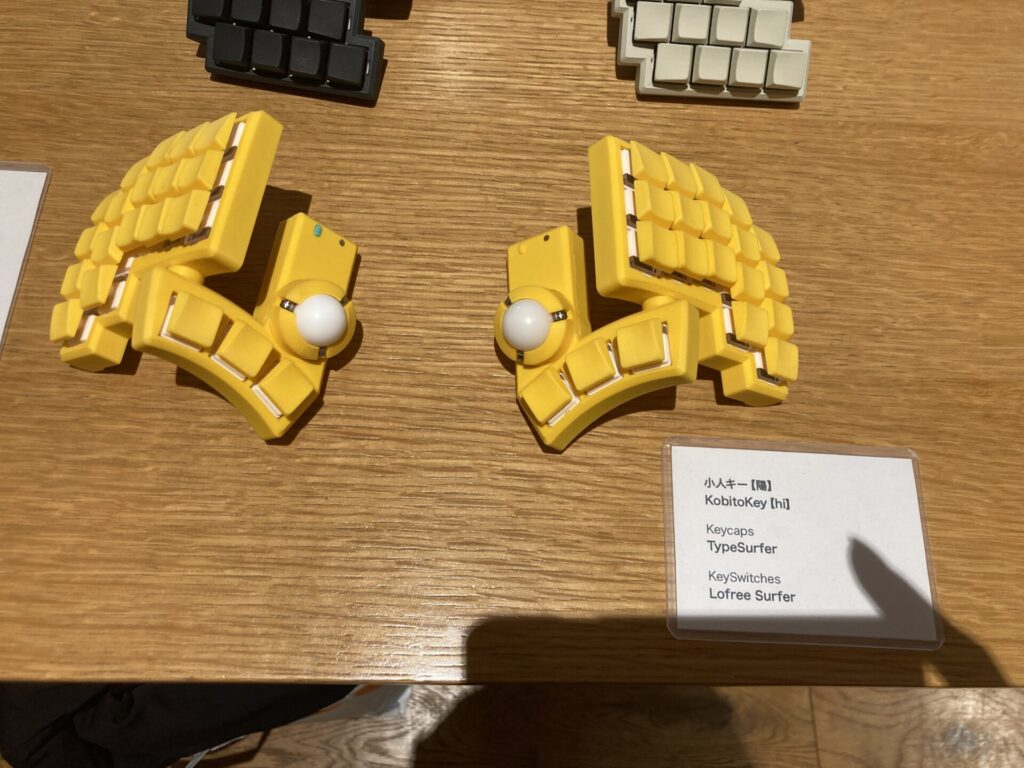
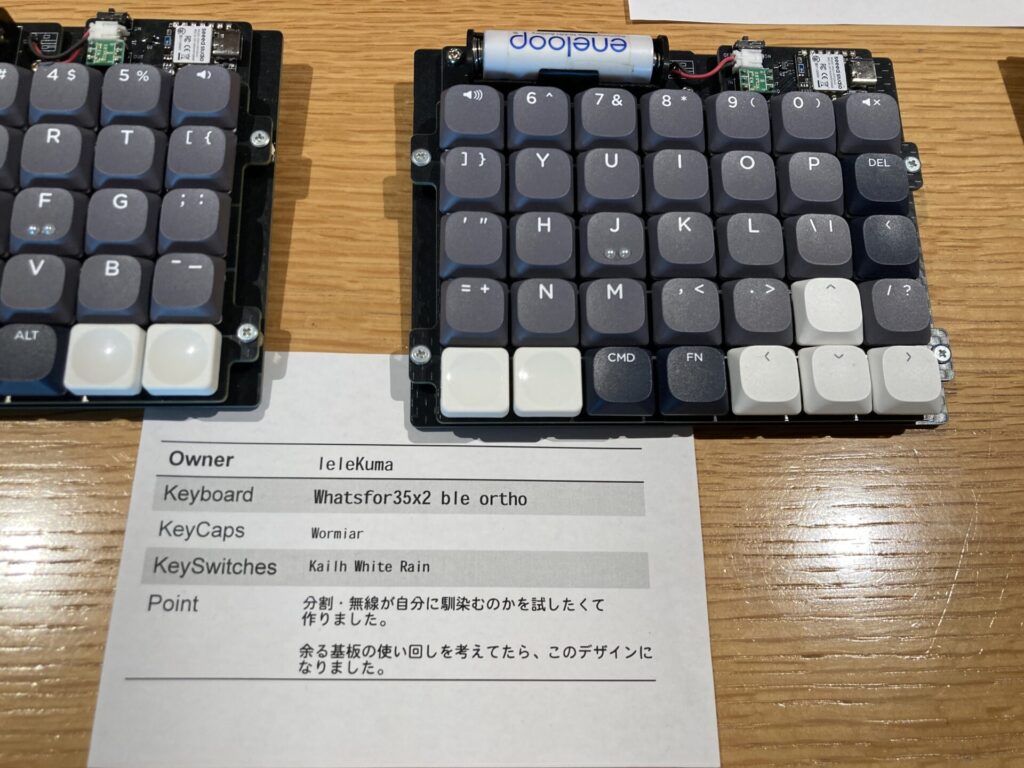
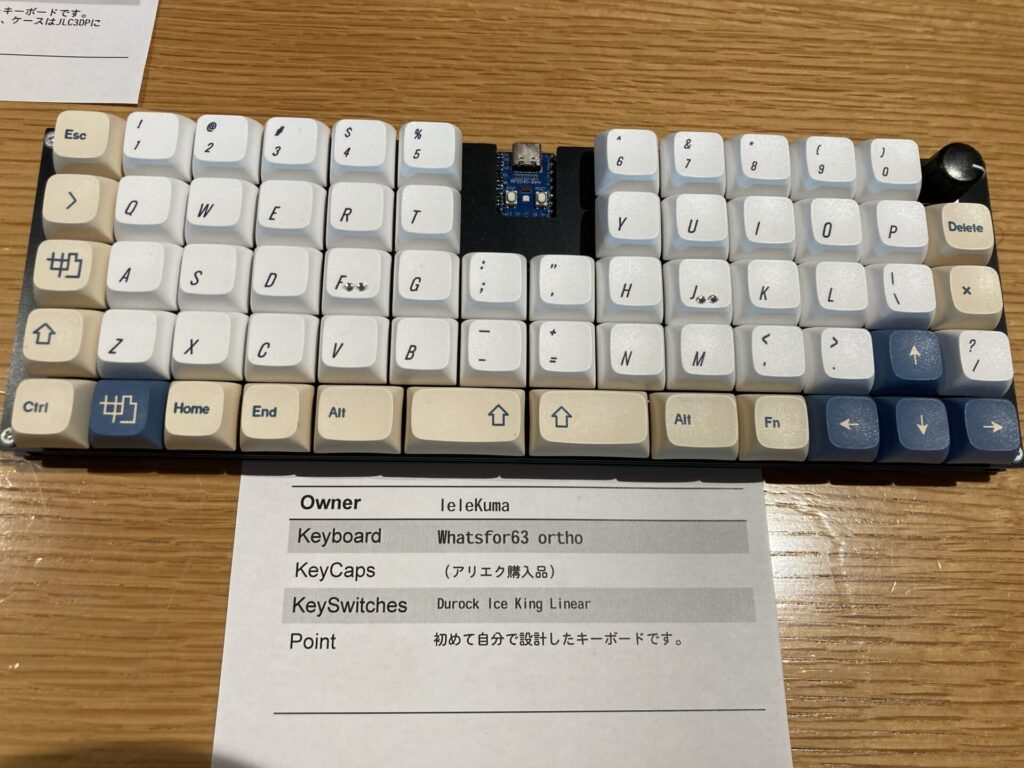
fdm狭ピッチ分割無線トラボオーソリニアでしょうか。
かわいさのあるデザインですね。ポインティングデバイス部分が奥側にあります。
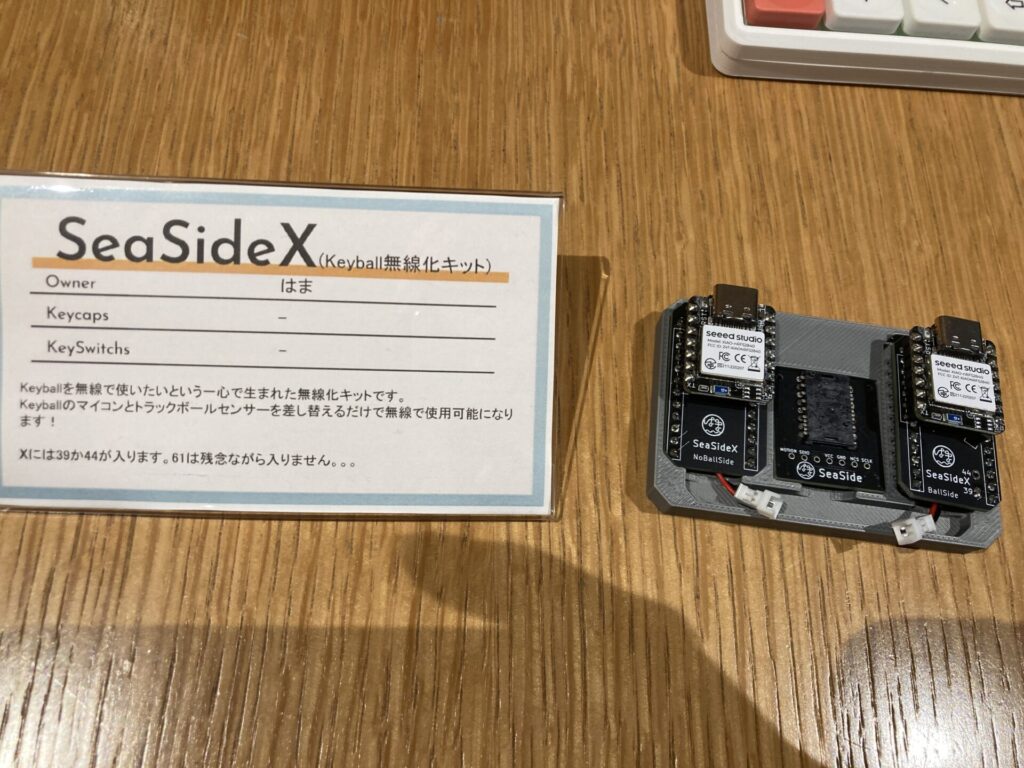
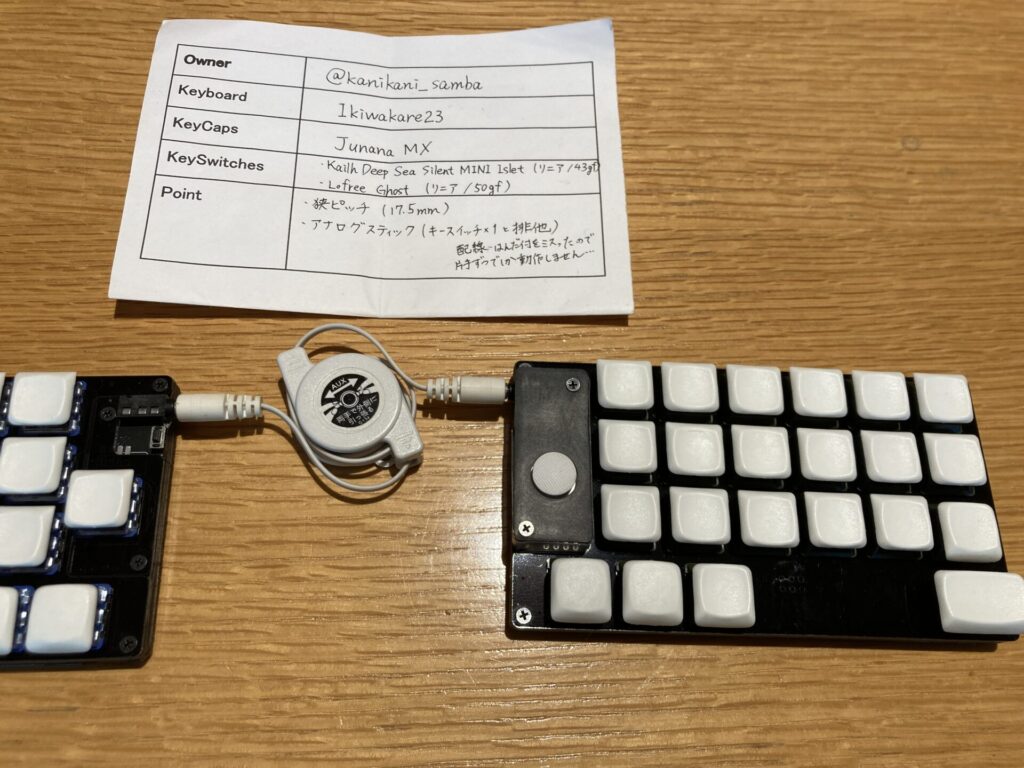
狭ピッチkeyball系統でしょうか。
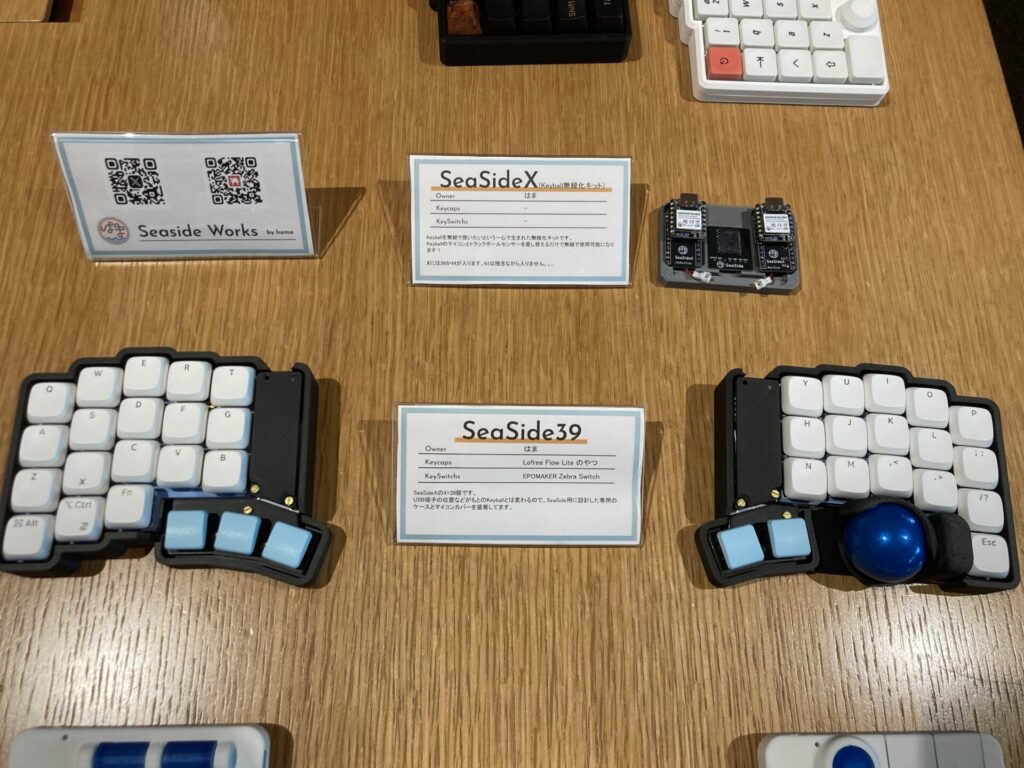

keyballを無線化するものも設計されているそう。
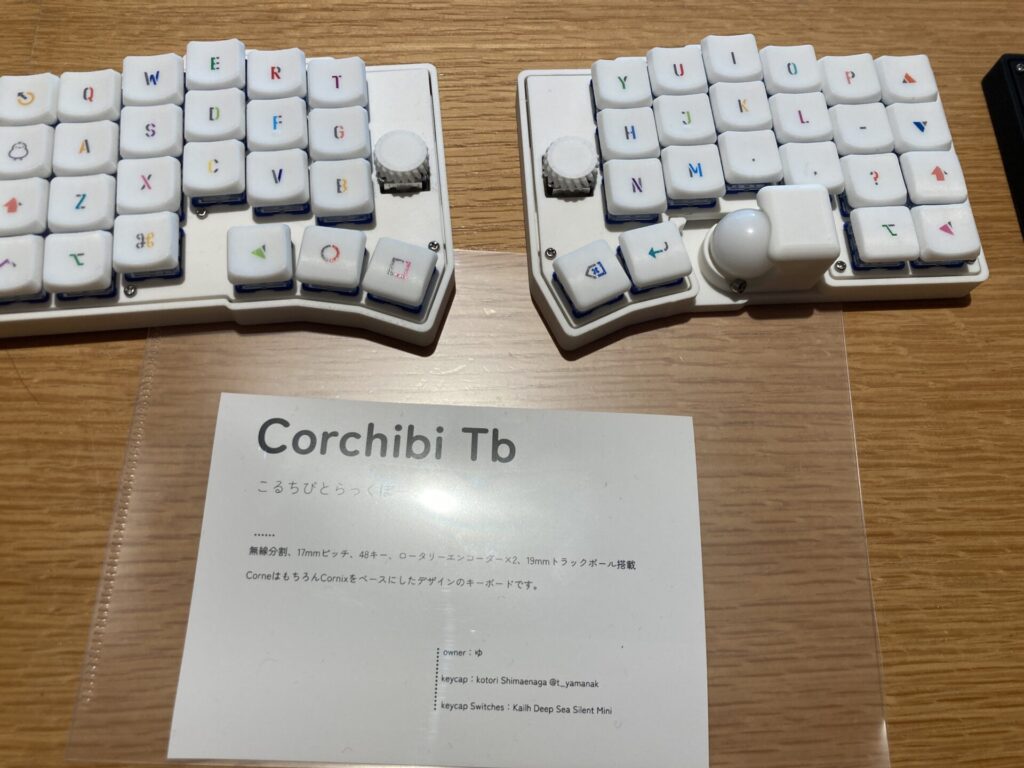
狭ピッチ分割無線cornix配列でしょうか。狭ピッチでコンパクトさが増して見えます
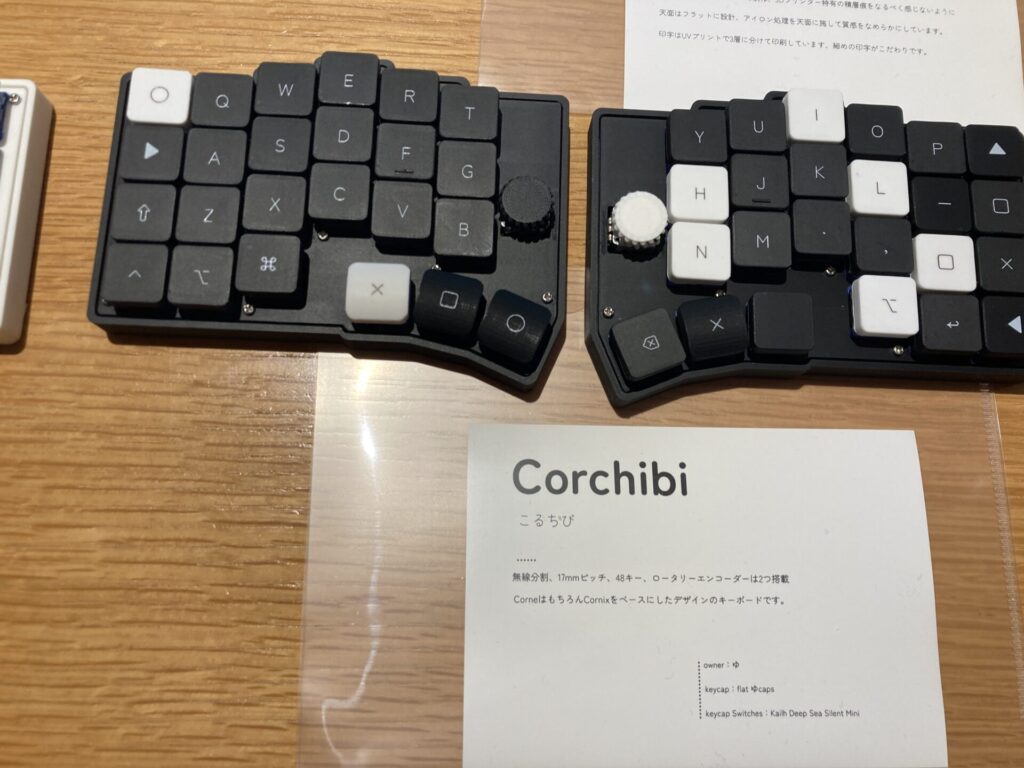
ぱっと見わからないですが、キーキャップはfdmでしょうか。uvプリントの印字はとてもくっきりしています。
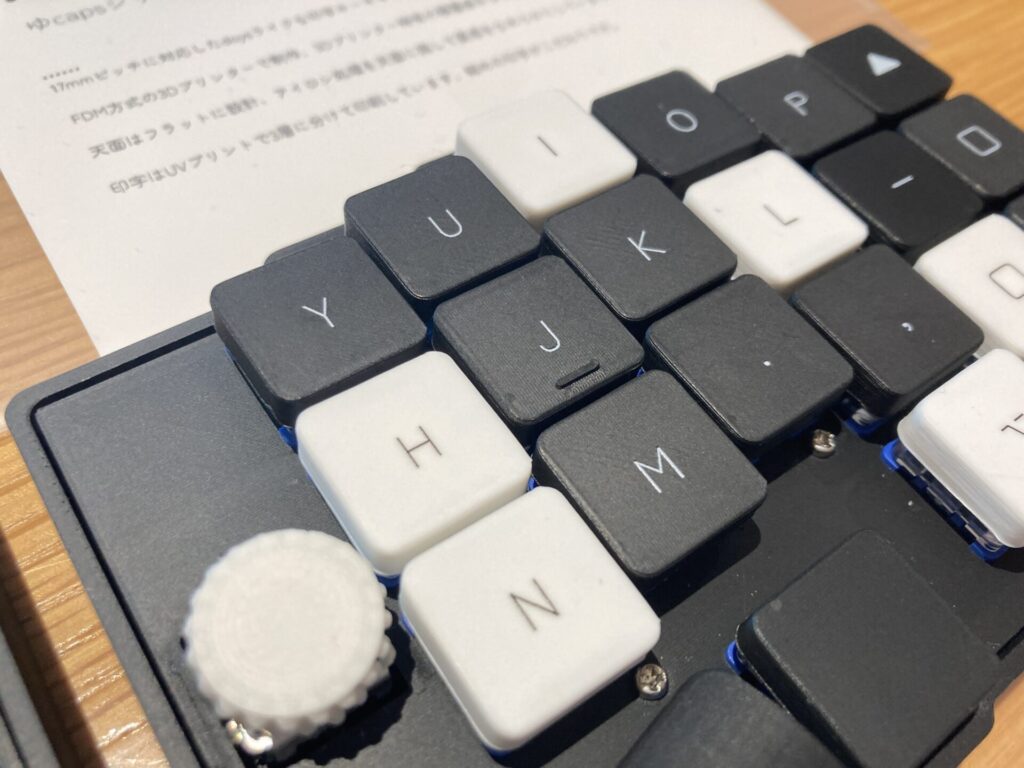
加えてトラボもついています。こちらもキーキャップはuvプリントのようです
狭ピッチ分割無線オーソリニアでしょうか。コンパクトです。トラボもついています。
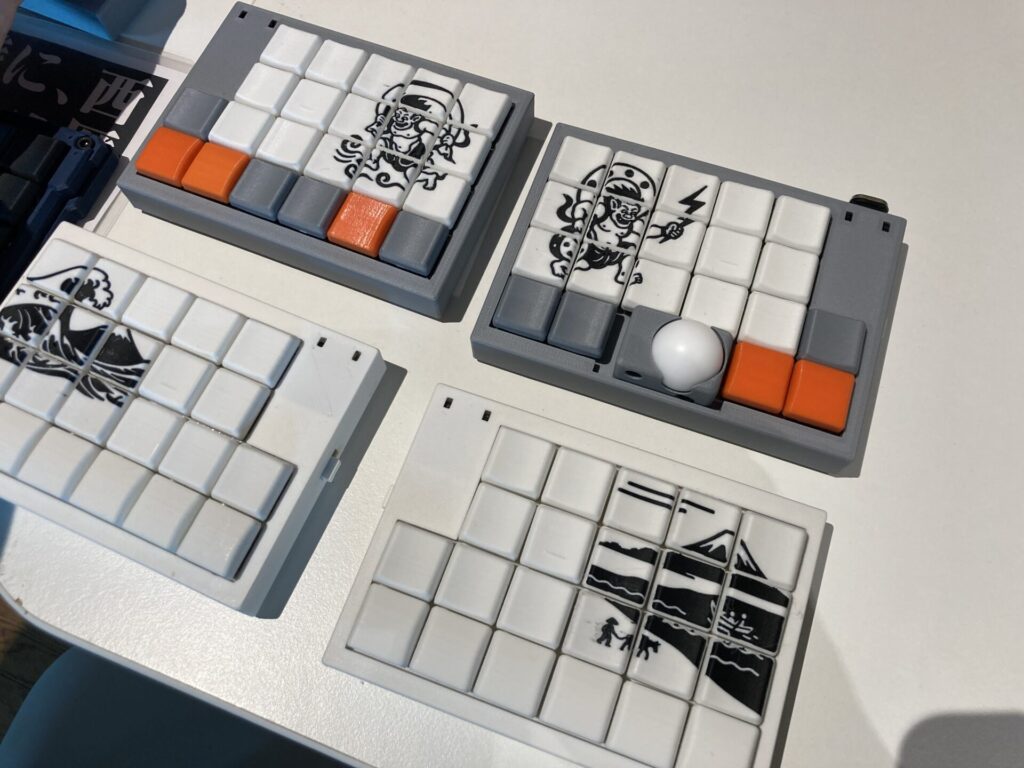
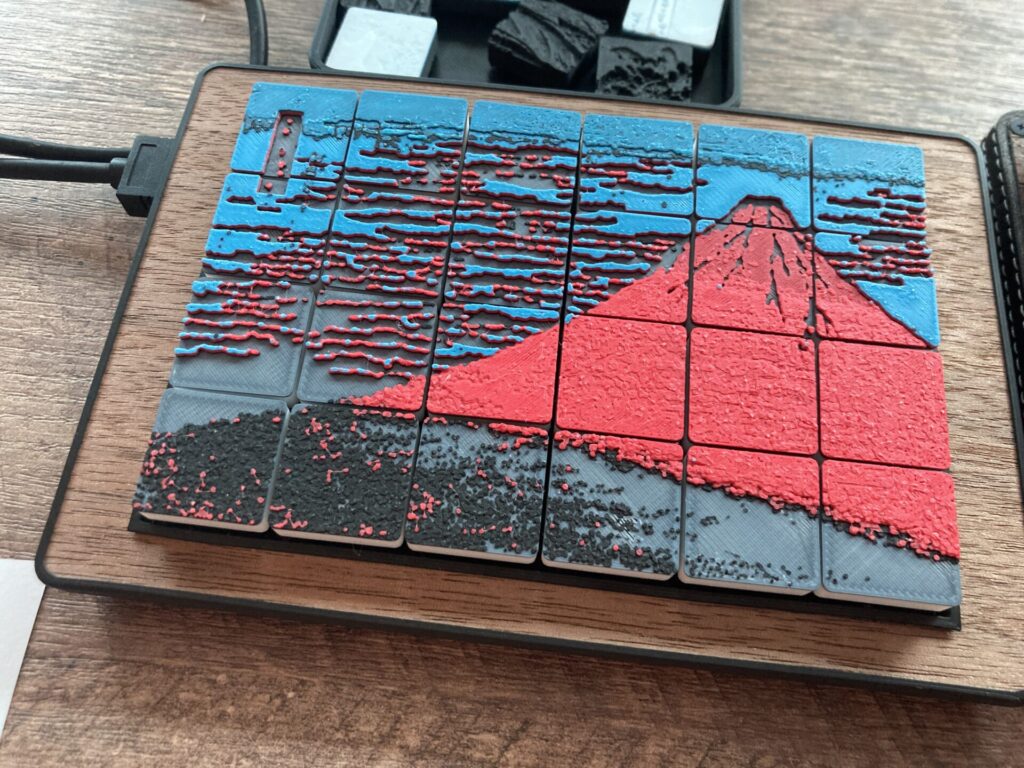
fdm外装でキーキャップもfdm、多色で柄つきです。すげ
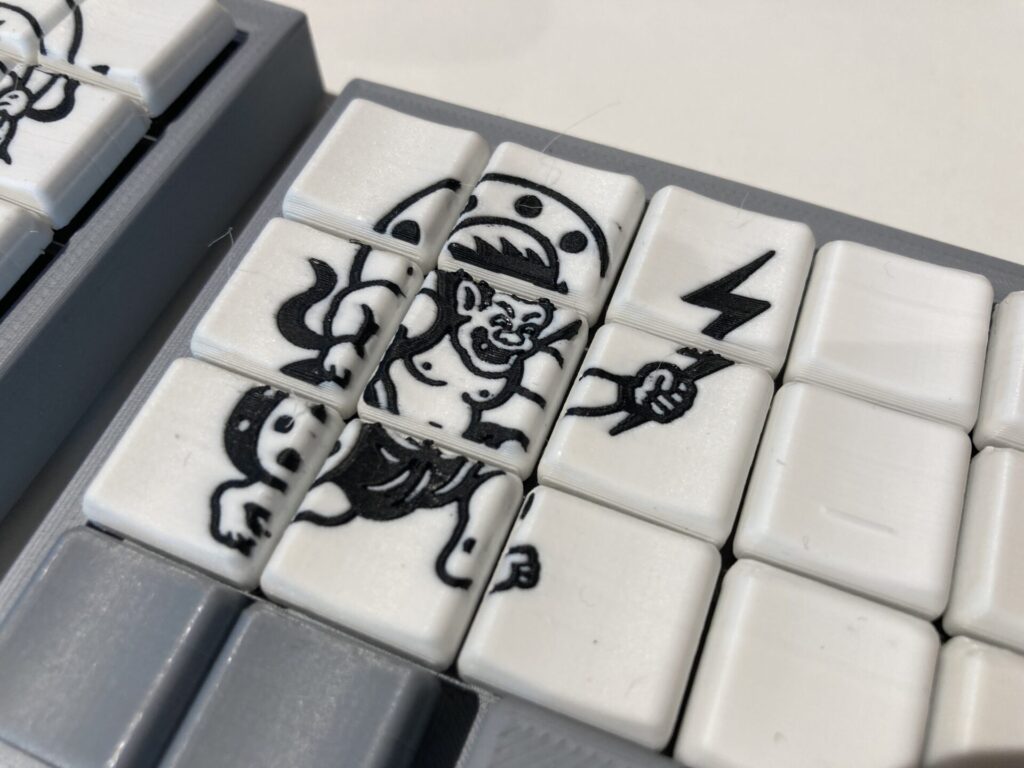
他の方の多色印刷とはまた違った、凹凸があり絵画柄です。
アルチザンキーボードとでもいったところでしょうか。すげえ
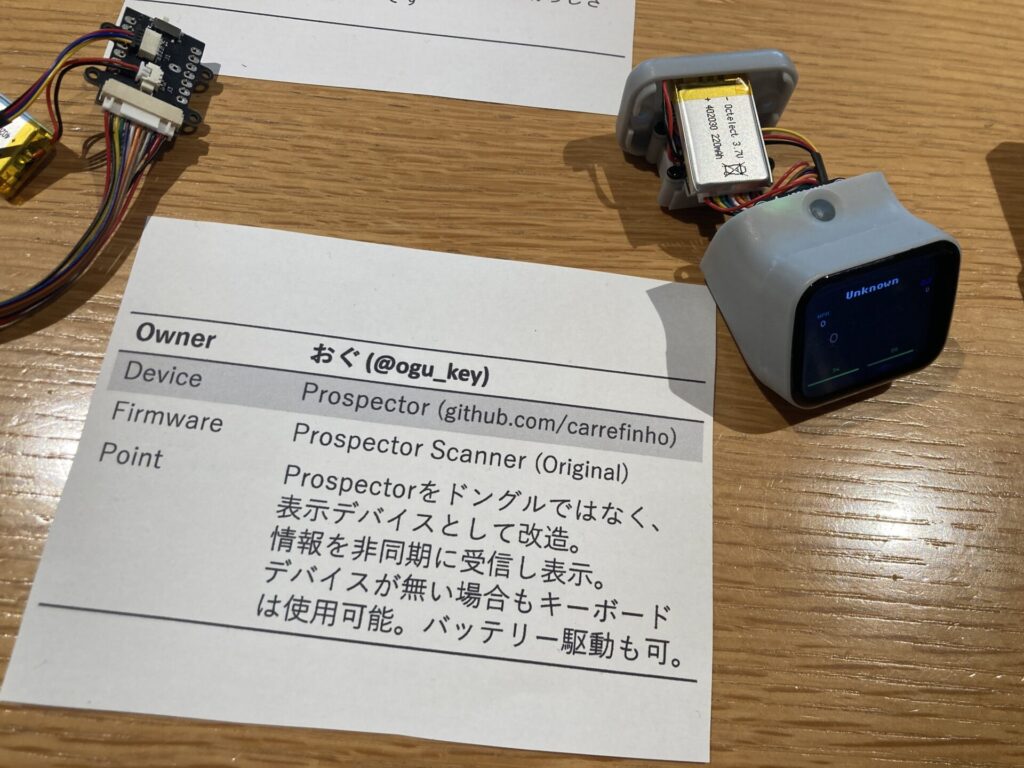
オープンソースのbtレシーバー(で合ってますか?)のprospectorをもとに作られたキーボードの状態表示デバイスだそうです。
こちらはレシーバーではなく、ブロードキャストでキーボードの情報を受信しているそうです。今の状態どうなってんだ?とはなりがちなのでかわいいですしよさそうです。
親指とトラボ部が無段階でテントする機構のようです。
どのように実現されているのかわかませんが、なかなか大変そうです。すごい
こちらも3dpをフル活用されていそうです。
こちらも聞こうは異なりますが親指部がテントする機構を持っています。底部にメモリがついておりテント角を調整できます。
一見してフラットなところからガシンと変形するのは楽しさがあります。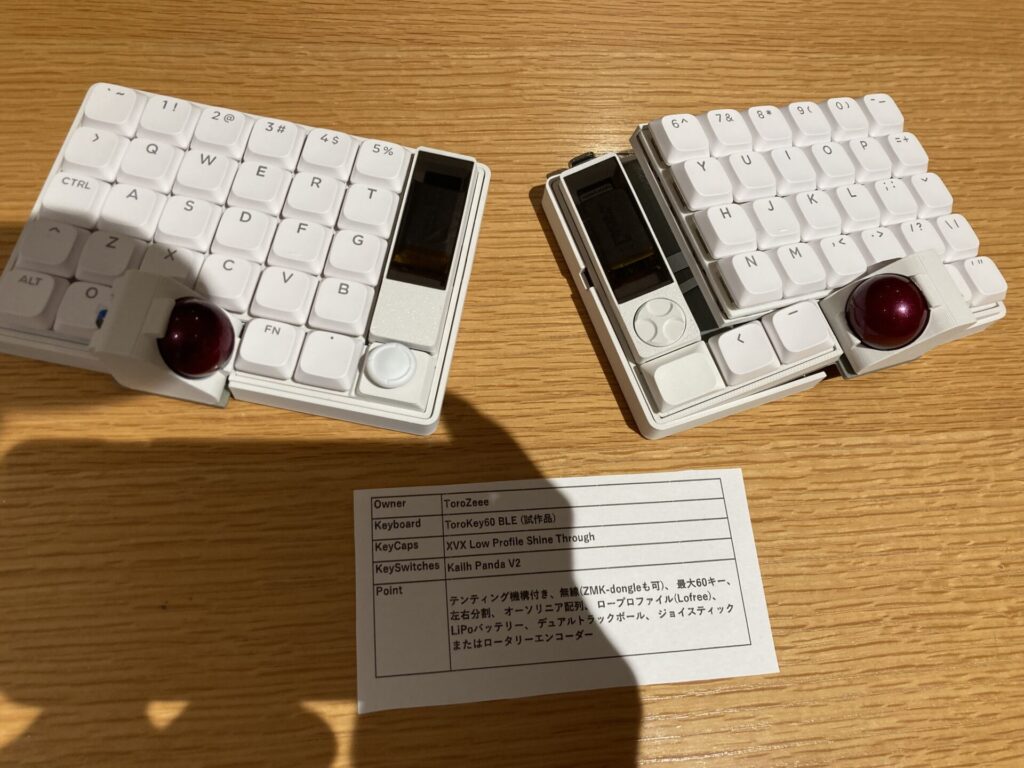
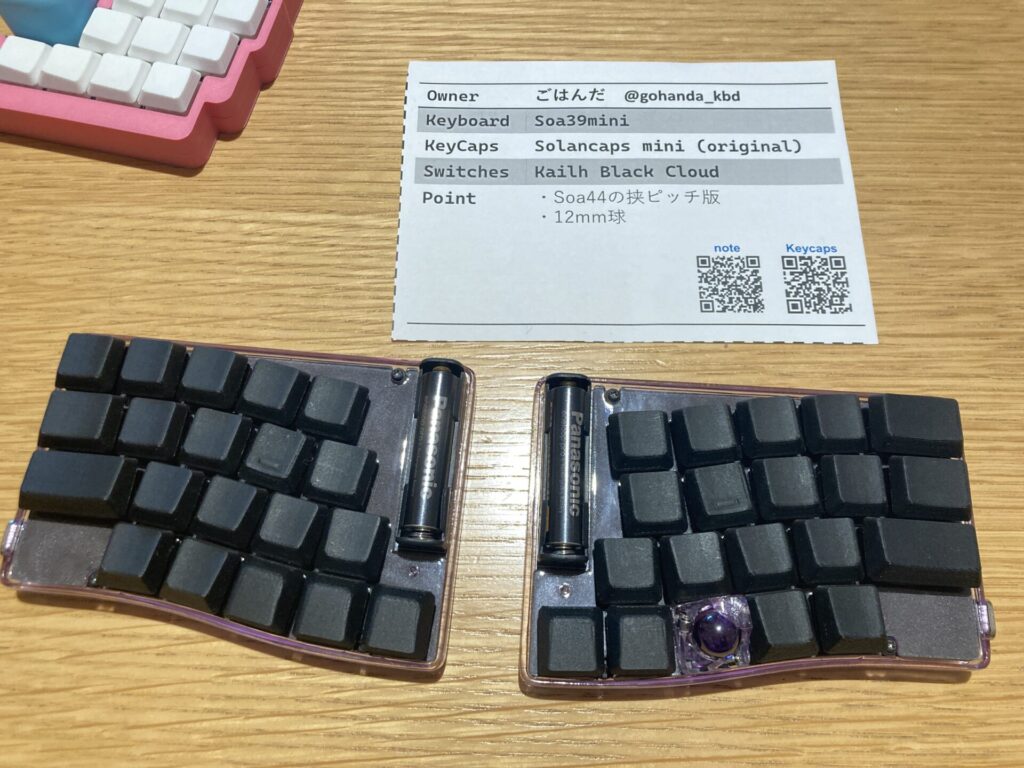
zaruballは無線keyball61という感じでしょうか。keyball派生形の造形深くないので違っていたら申し訳ない。
狭ピッチが多い中で通常のスイッチ、キーキャップを使えるのもまたよさそう。
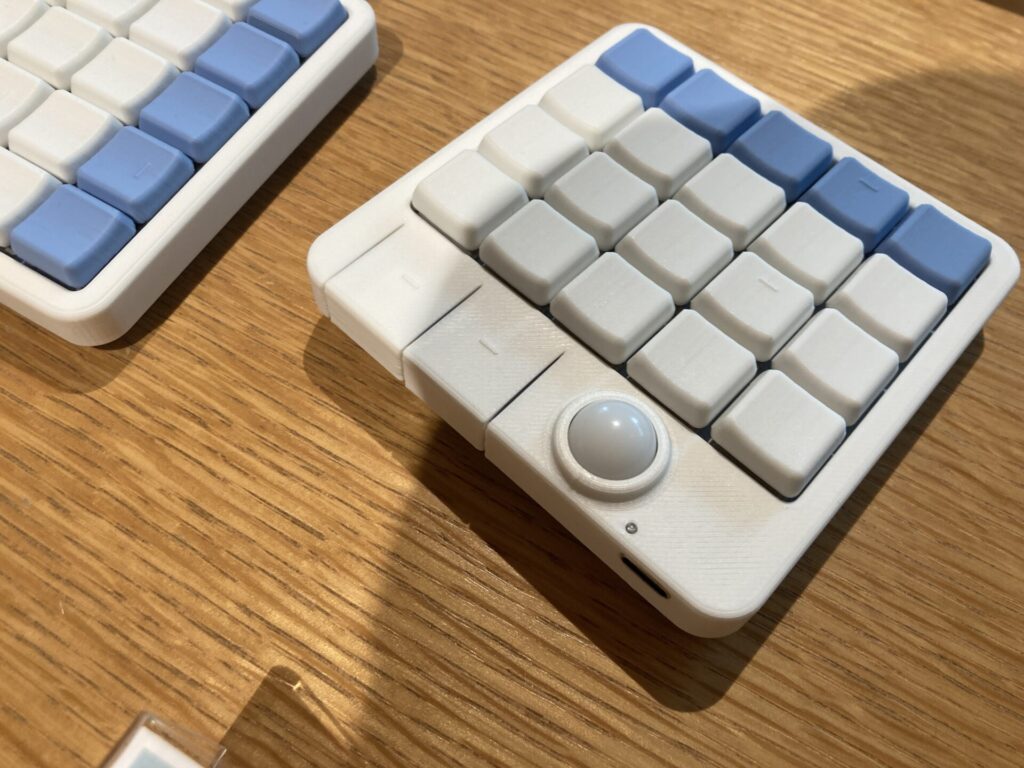
monaはロープロ無線狭ピッチkeyball39という感じでしょうか。クリアケース綺麗ですね。

イメージキャラクターもいるよう
圧巻です。デザインの組み合わせが無限大ですね。

コンパクトなキーボード。
ケースにこだわりが感じられます。
毎度見るたびに進化している気がします。すごい

M5が装着されています。

乾電池で動作するようです。
こちらは前身の作品でしょうか。
分割狭ピッチのよう
ゲームパッドのジョイスティックがついていました。

75%分割を開発中のようです。
コントローラーがないなと思ったら、フレキケーブルで引き出すようです。
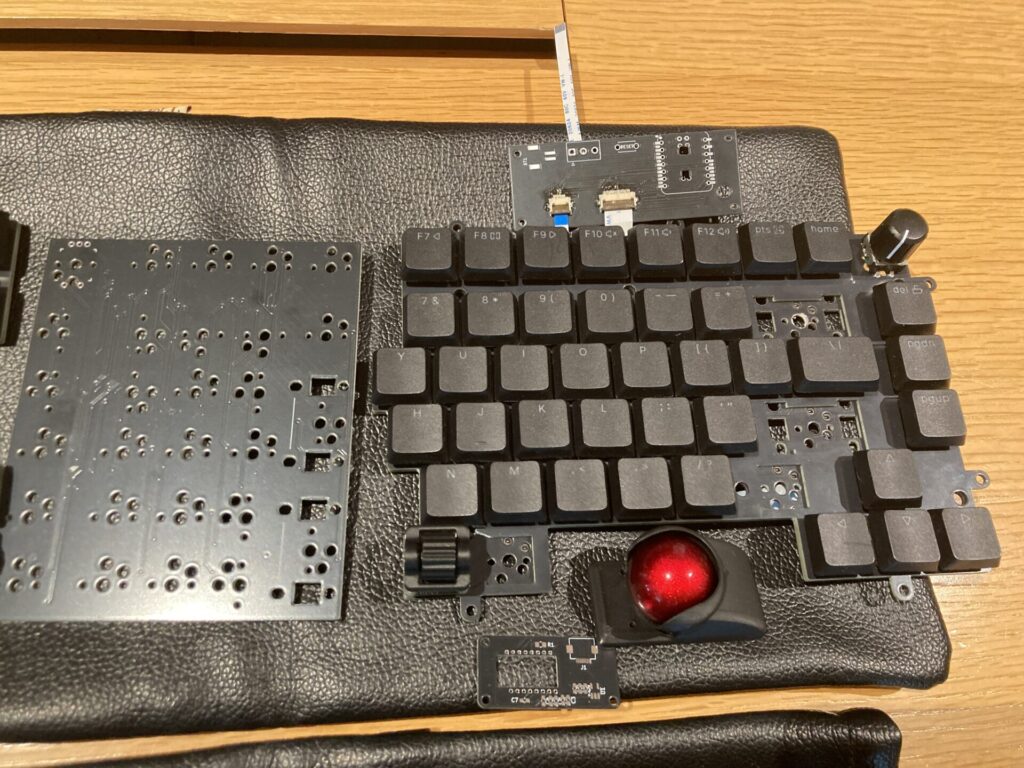
トラックポイントがついています
基板パターンも魅せています
4×7の分割オーソです。
キーキャップの選択など自分用というのが伝わってきます。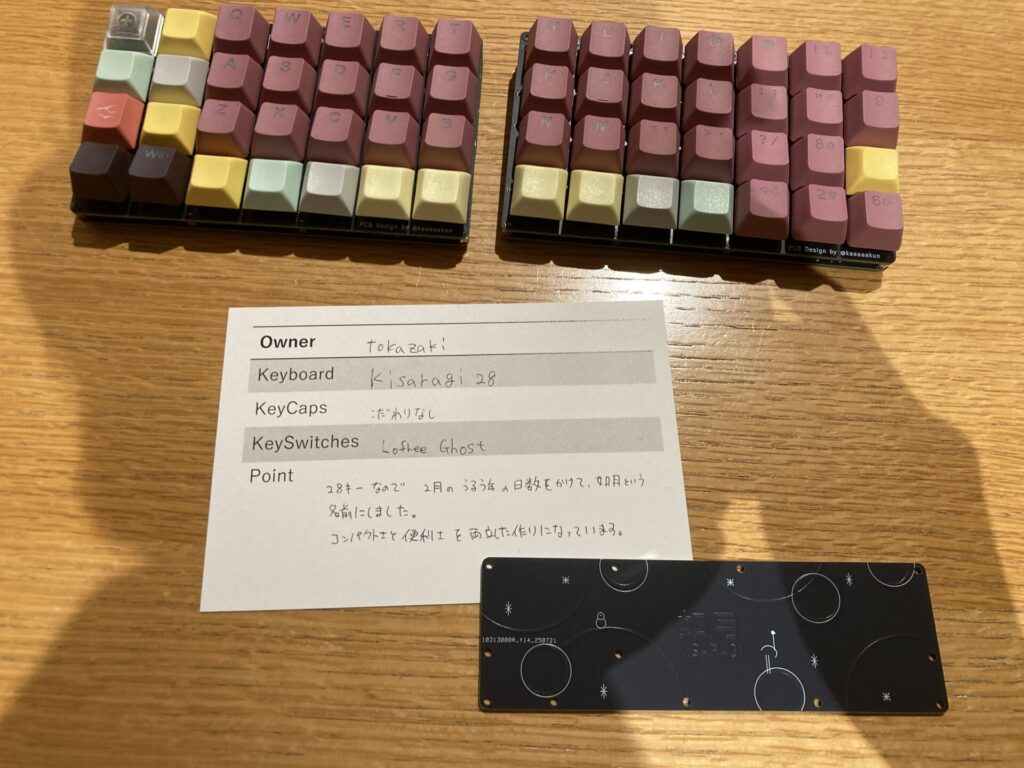
狭ピッチ無線オーソリニア
キーキャッププロファイルが弧を書いています
配列が自由自在です いろいろなデバイスにも対応していて触っていておもしろそう
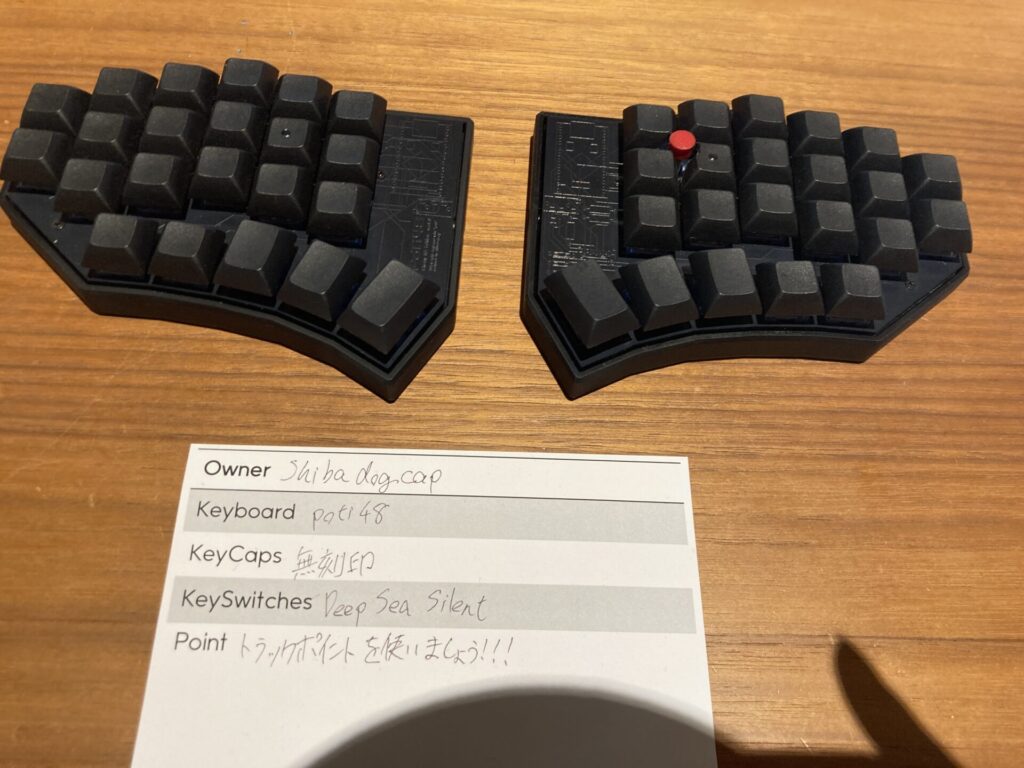
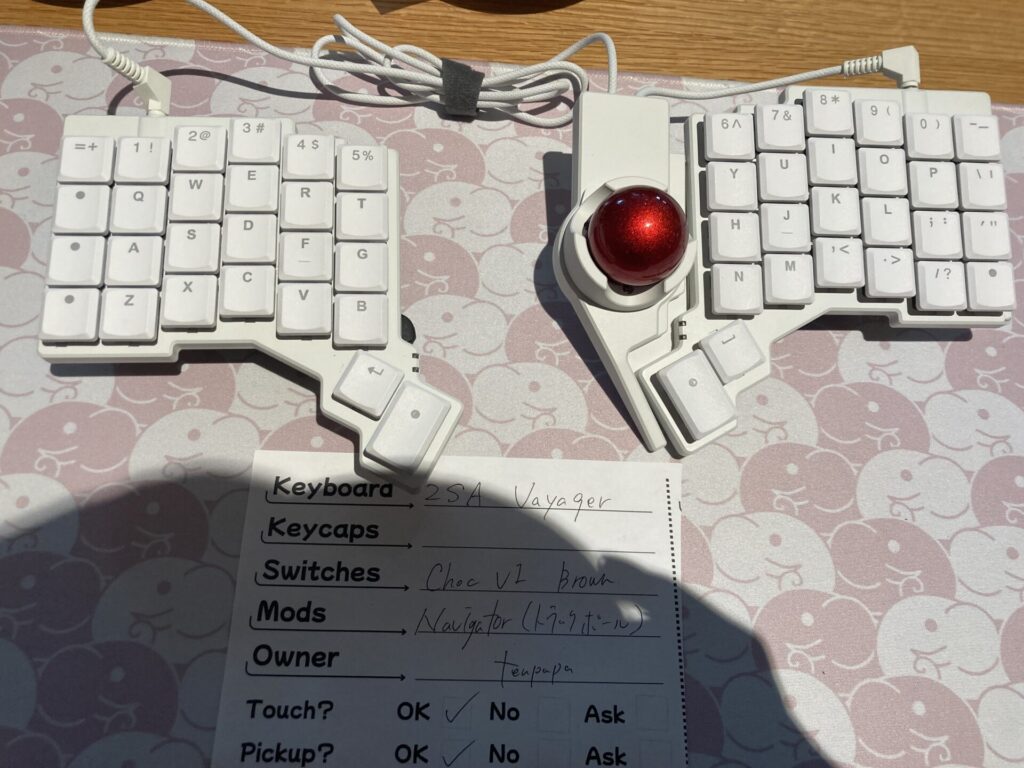
ロープロ分割無線トラボ
キーキャップfdmでしょうか。印字がとてもきれいに出ています。

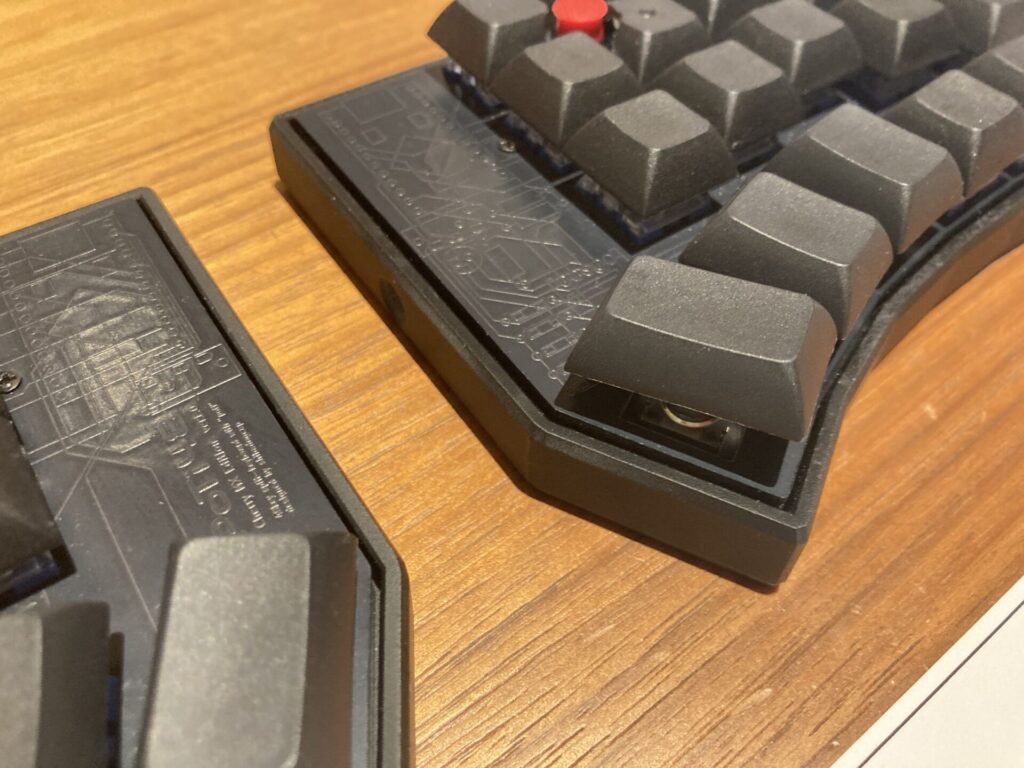
以前ロープロは拝見しましたが、MX版のよう。
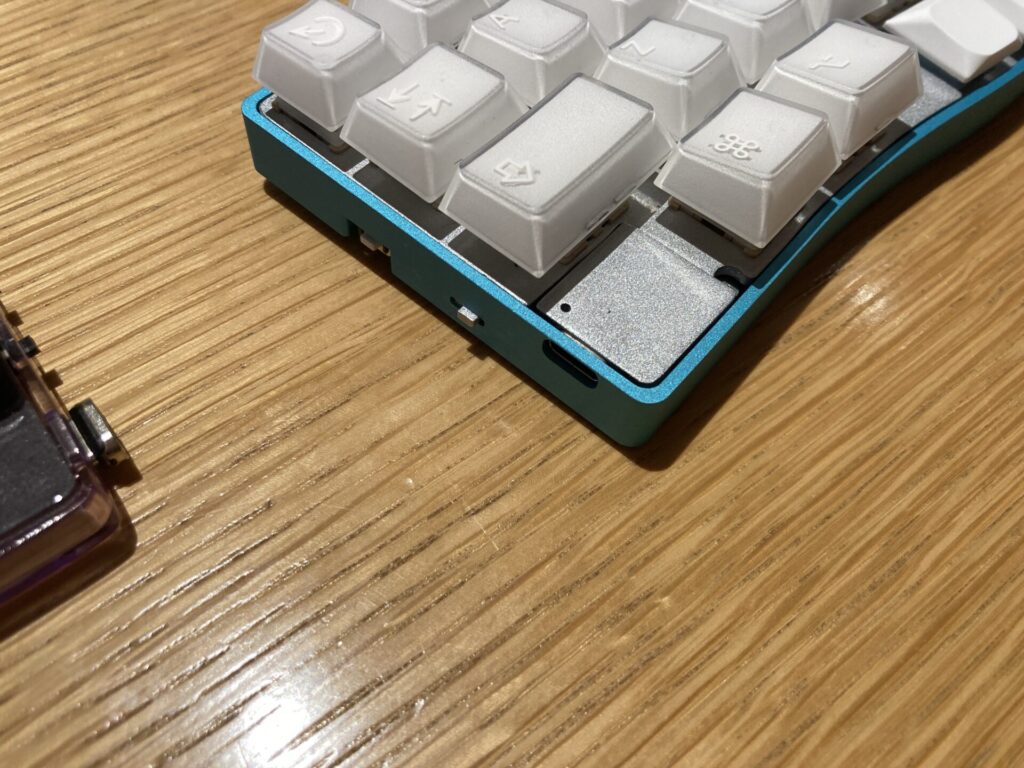
金属パーツもあり美しさがあります。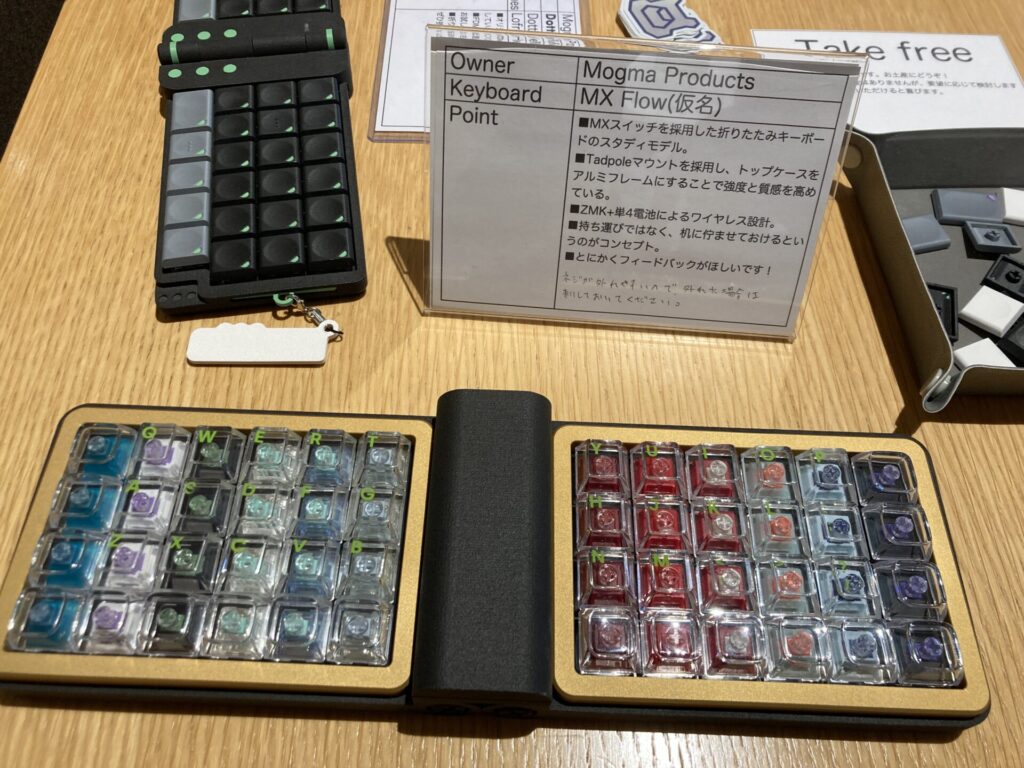
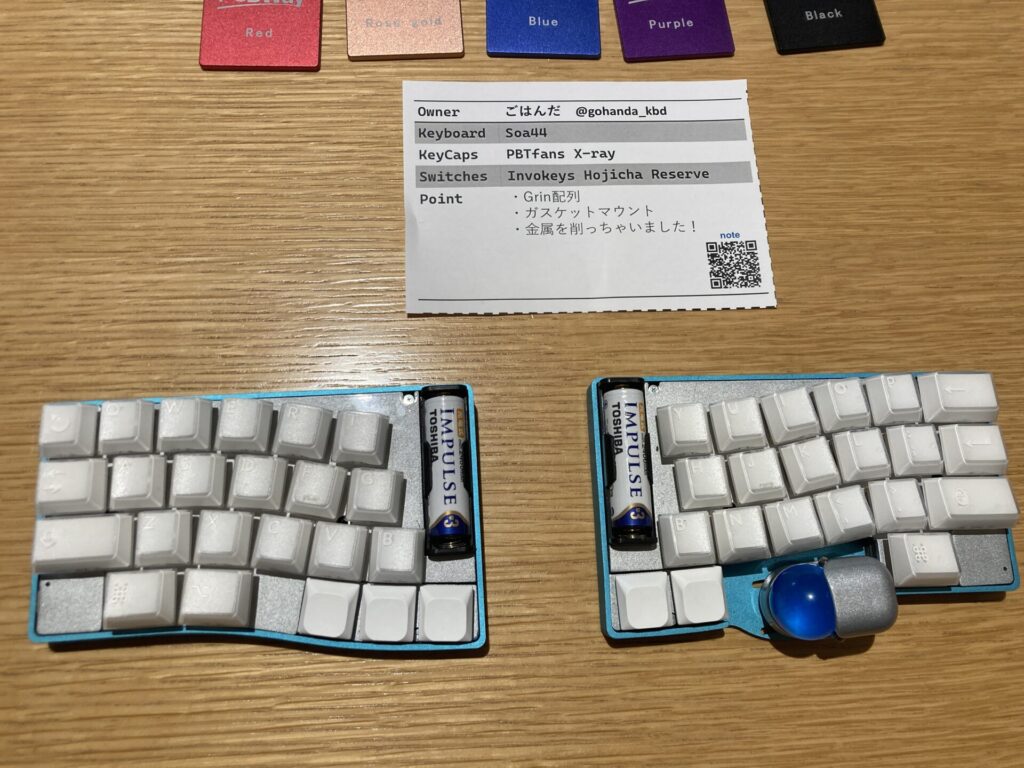
薄い。PG1316すいっちぱちぱちしていてきもちよいです。
かっこよい
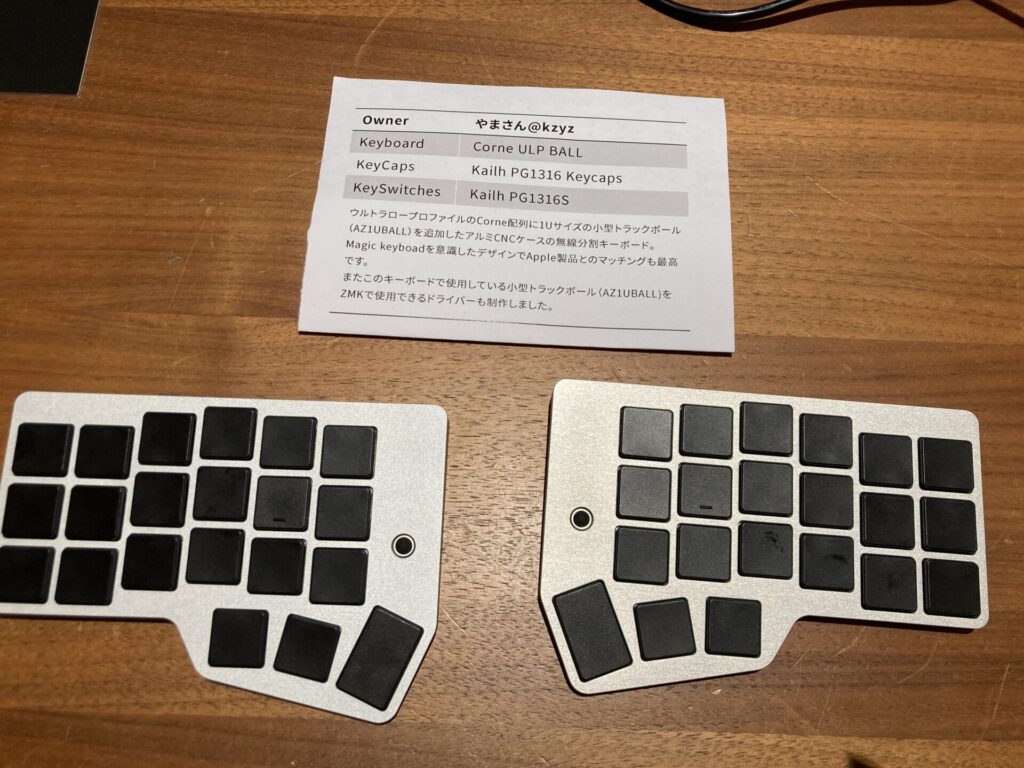
grin分割狭ピッチでしょうか。とてもちいさなトラボもついています。
アルミケース版
おお
カラスタ分割トラボのよう
薄く、az1ubalもついています
分割ロウスタッガードトラボです

結構下の角度からも操作できます

カスタム、ロウスタッガードなど
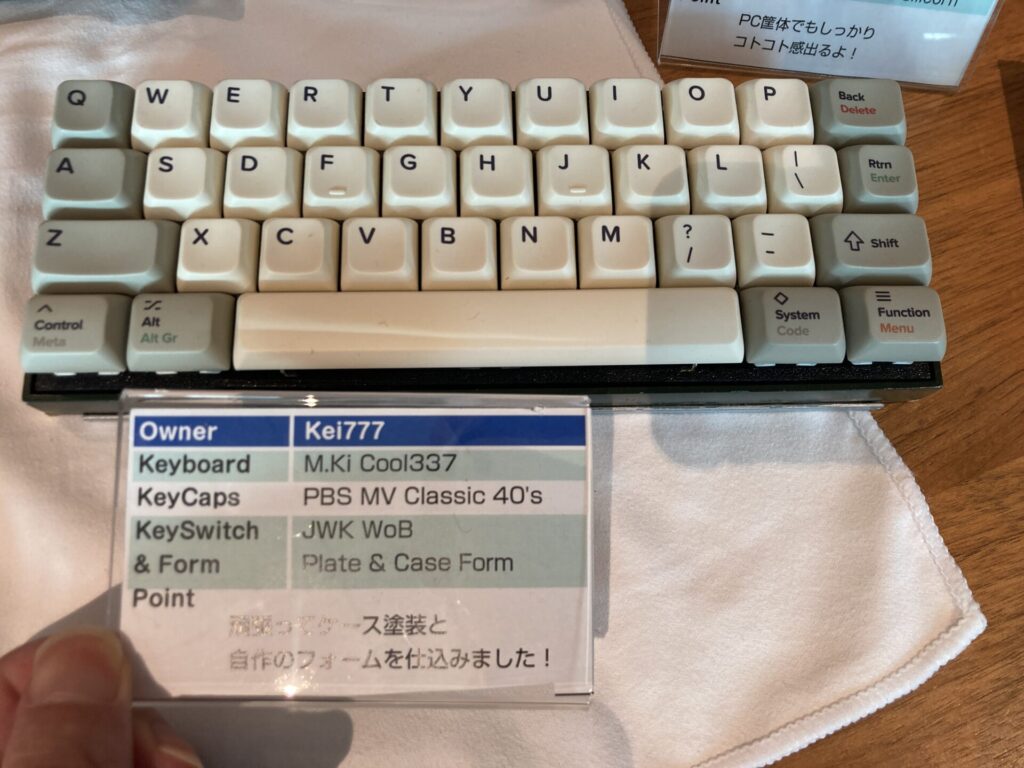
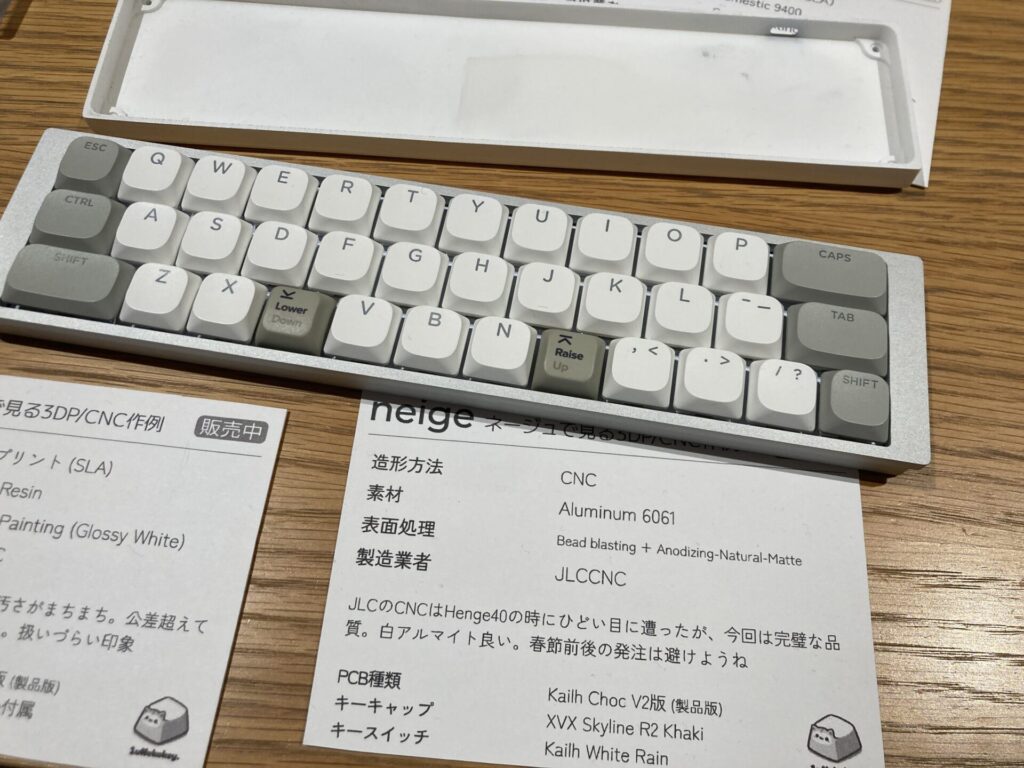
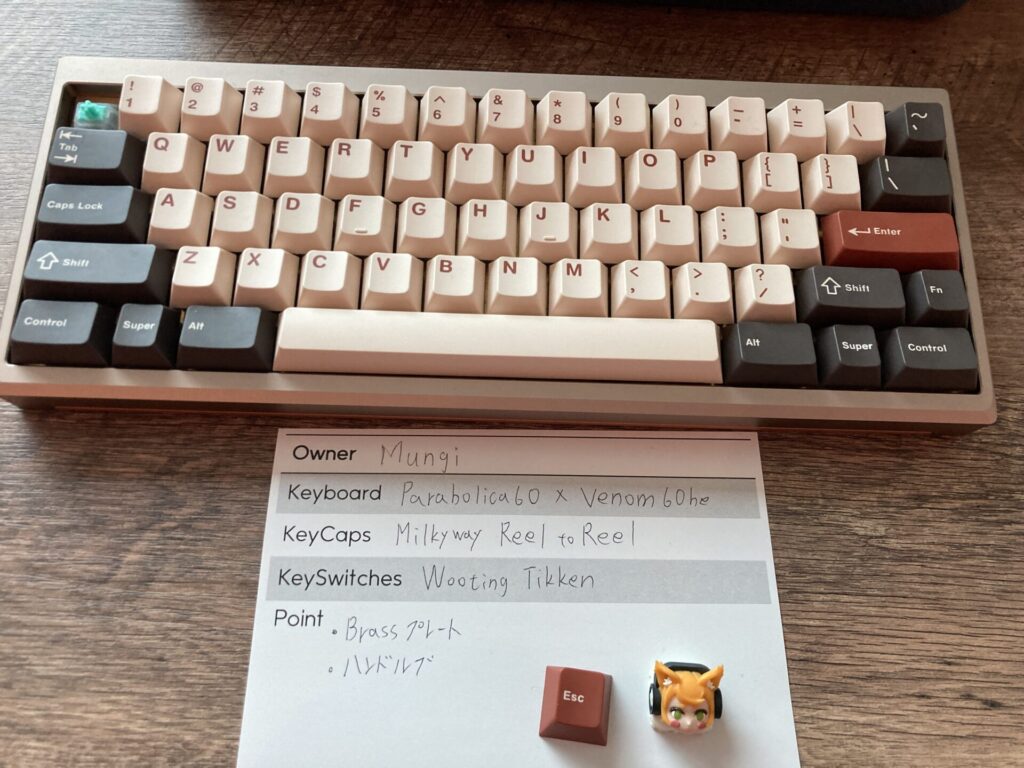
ひときわ輝いていました。こだわり配列の60%だそう。自家実装の様子など見せていただきました。
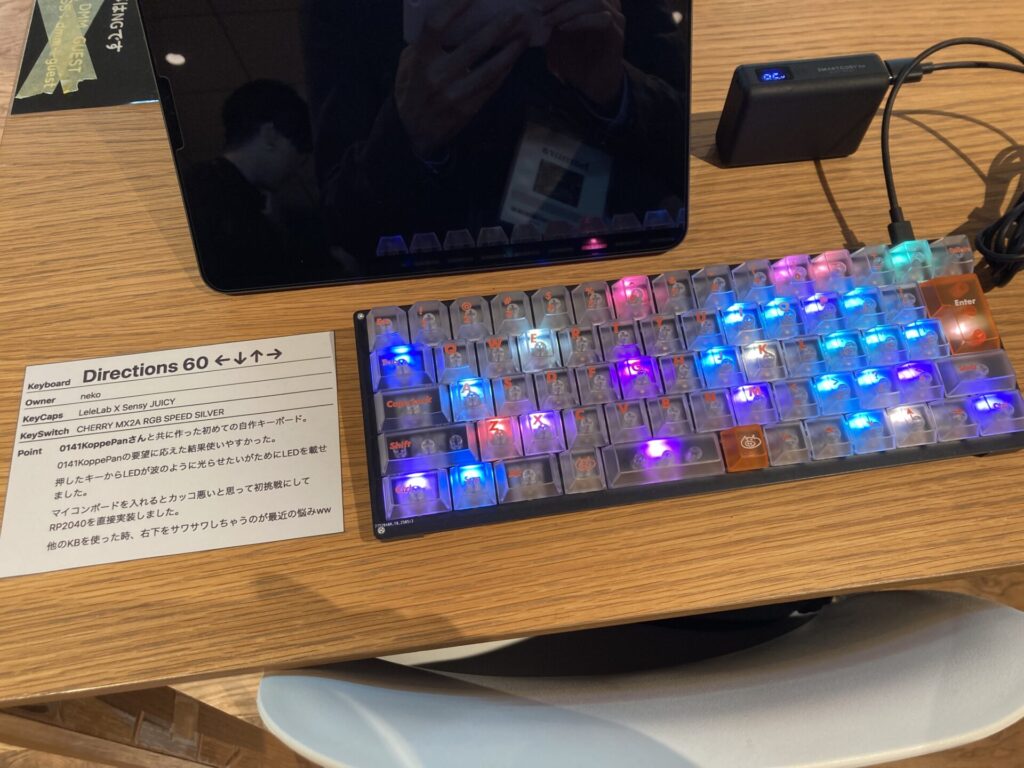
底面はシンプルなfdm製。軽量なのがよいです。フルLEDです。

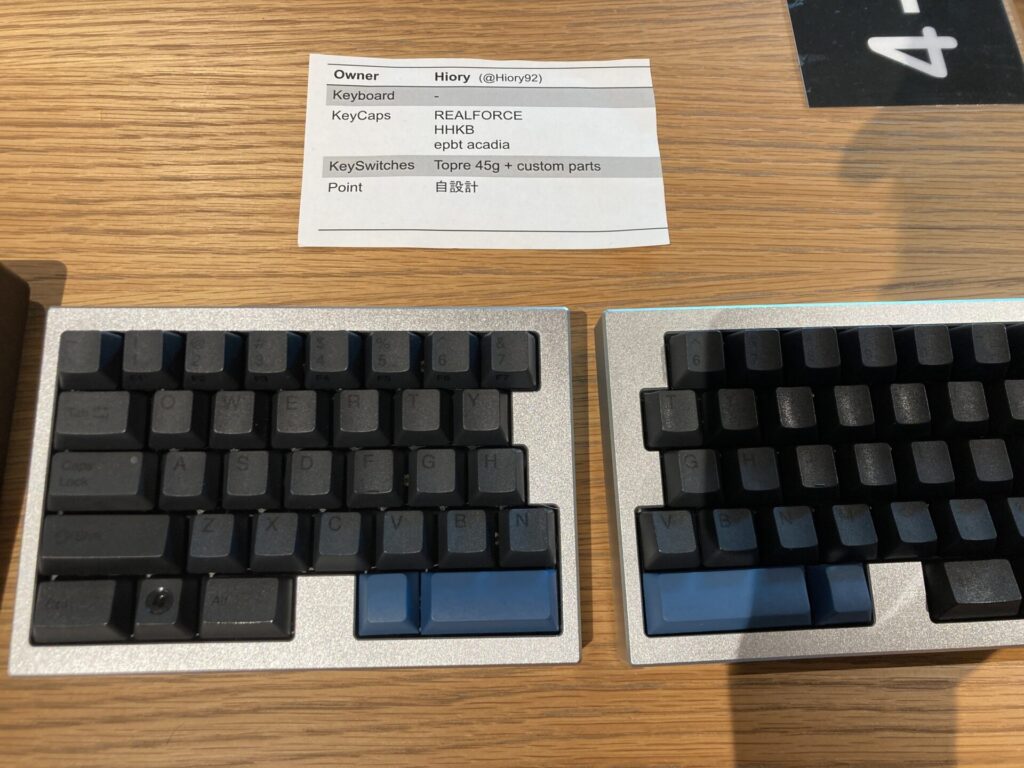
EC自作のよう。シンプルデザインな見た目のアルミケースが素敵です。

PCケースです。透けている赤いプレートはアルミでしょうか。
ぴしっとしていますね
ボトムケースはアルミでしょうか。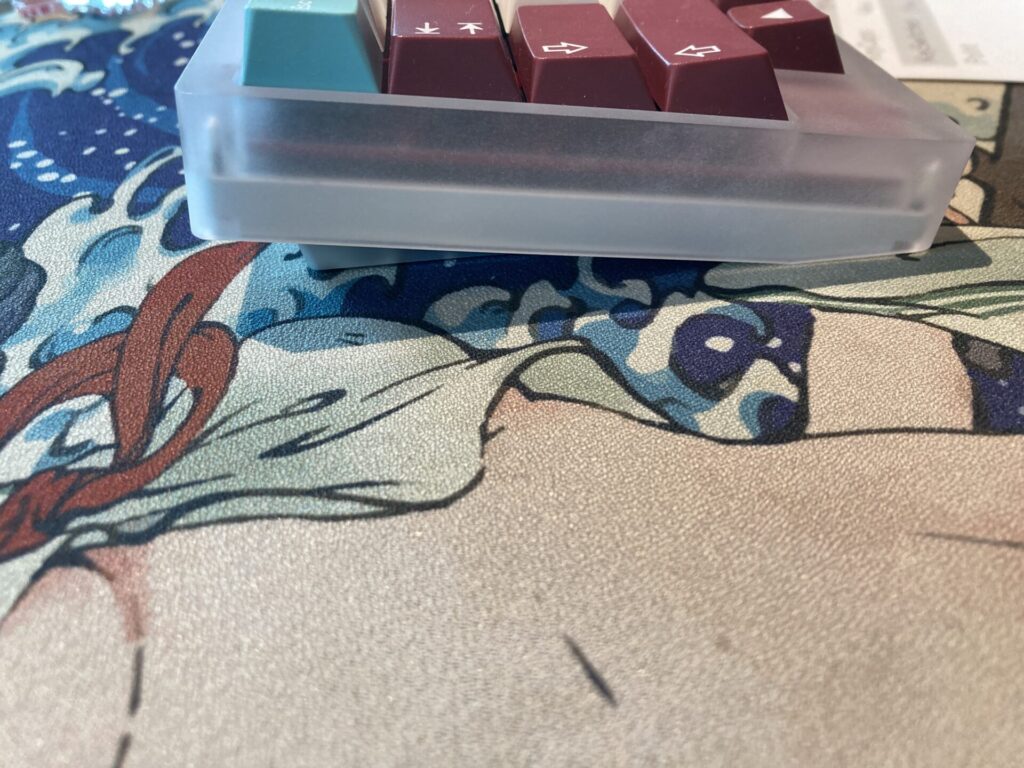
カラフルでかっこよいキーキャップです。テントしたアリスいいですよね。

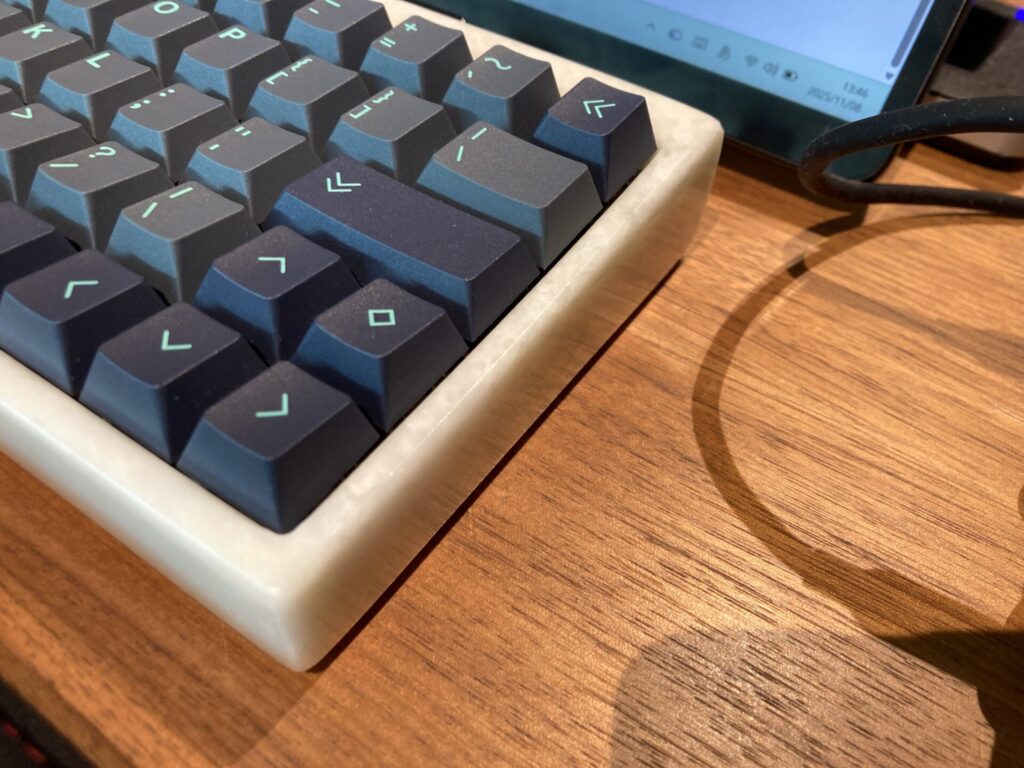
大理石ケース。質感がすごい。
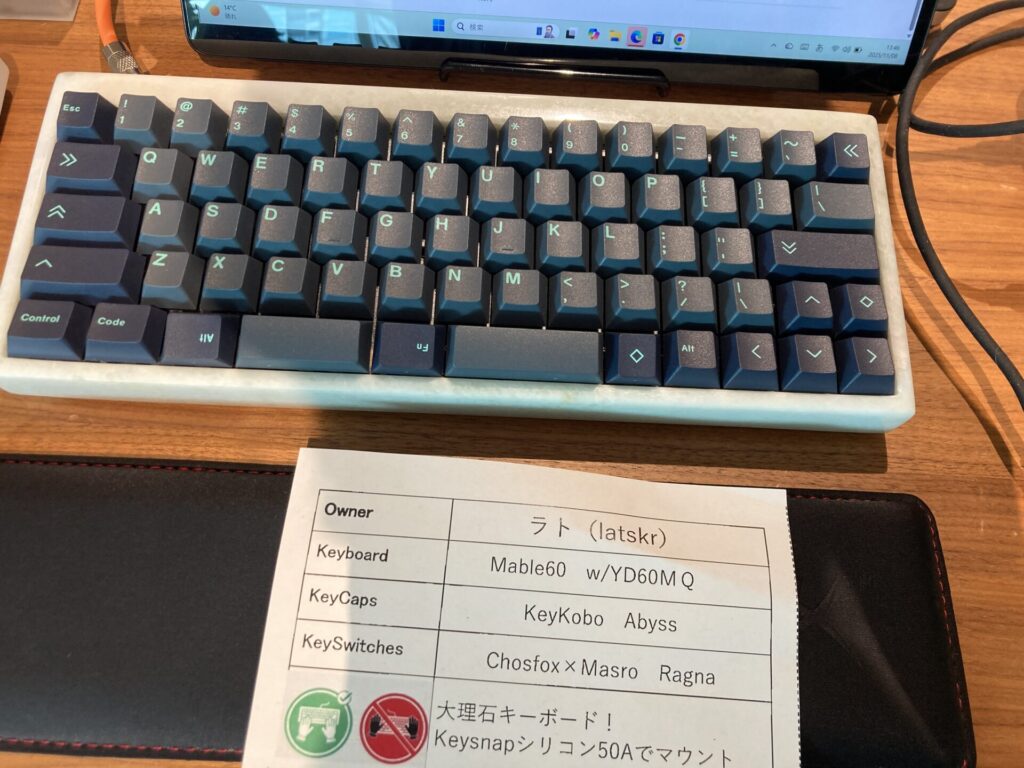
使うのがおっかなそうです
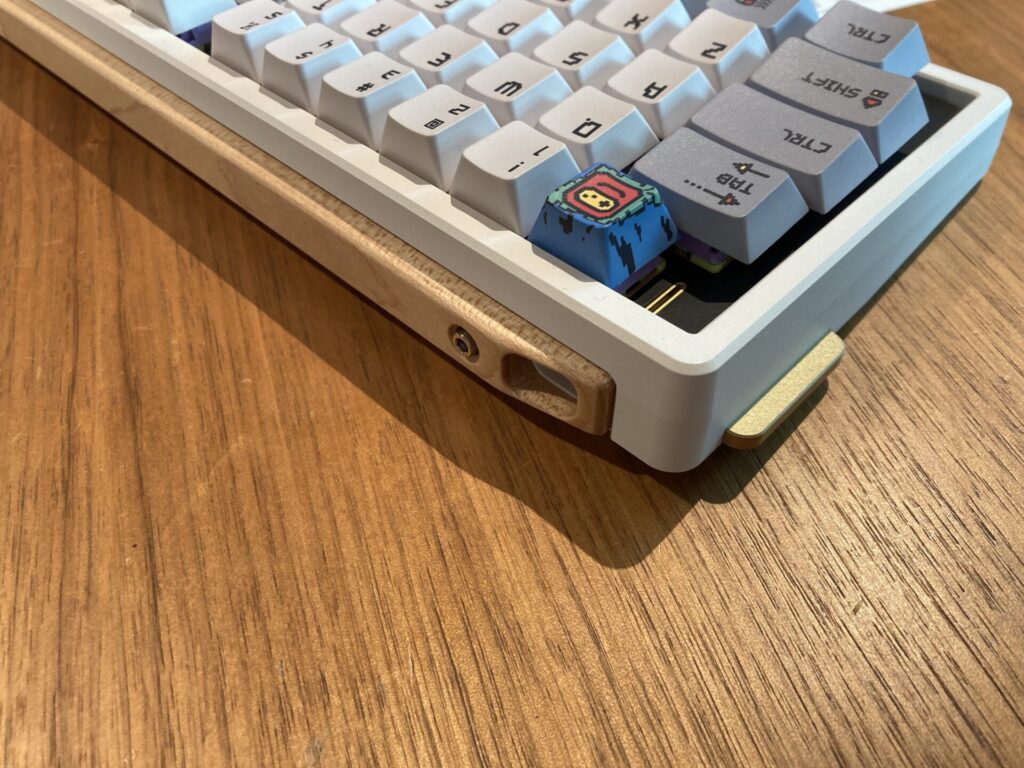
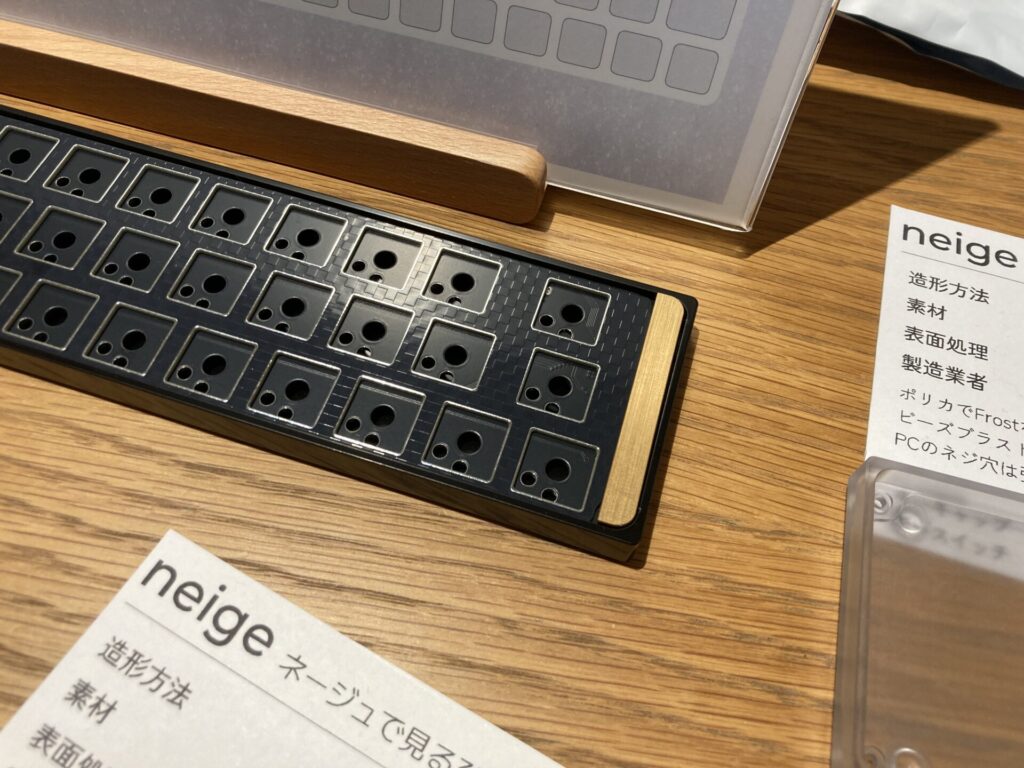
olsk

背面は木材パーツがついています。
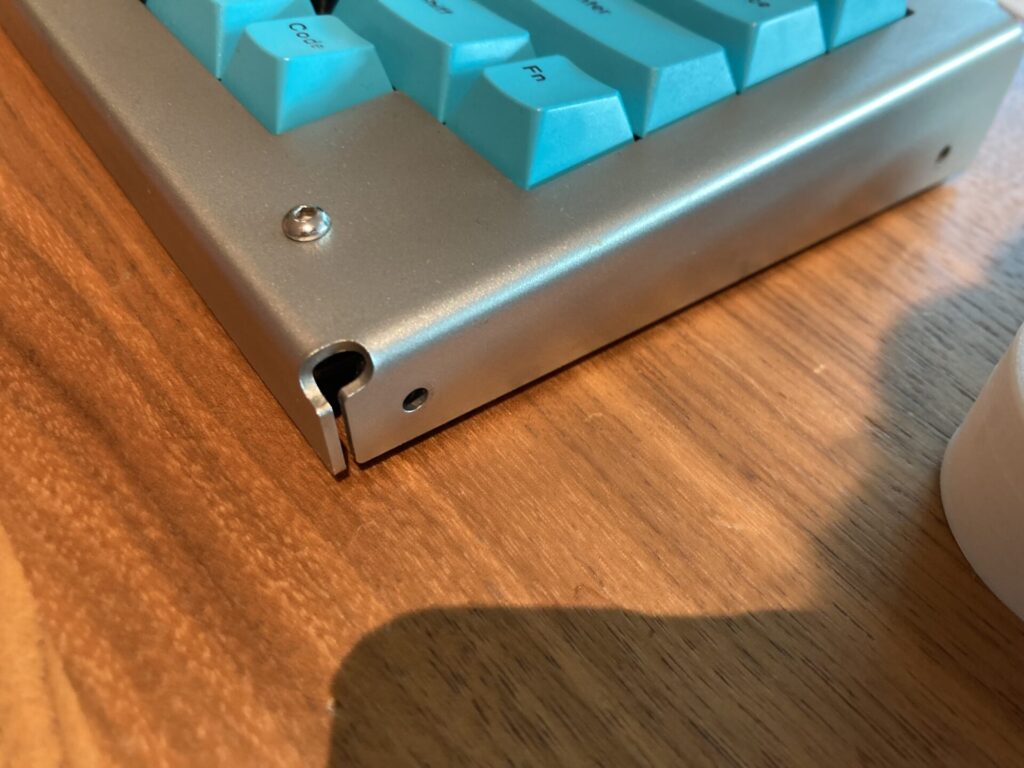
フル板金キーボードのよう
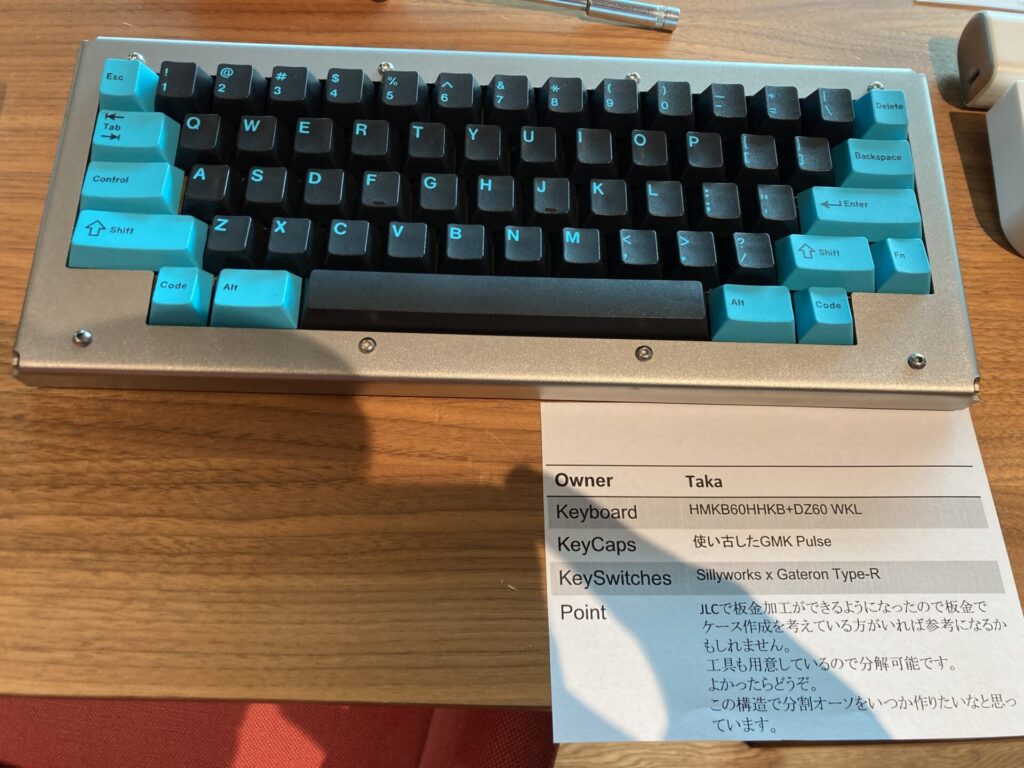
触っていると金属金具独特の感じで、おおとなります
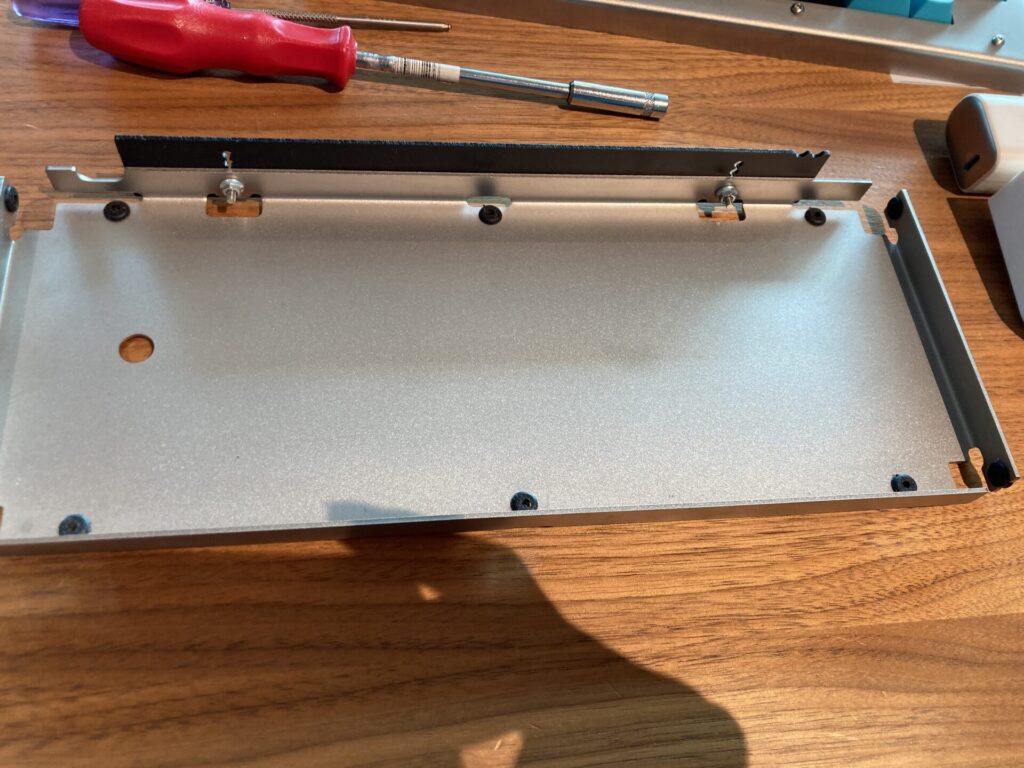
固定金具も見せる感じで主張があります。

こちらも板金キーボード。キーケットで出るよう
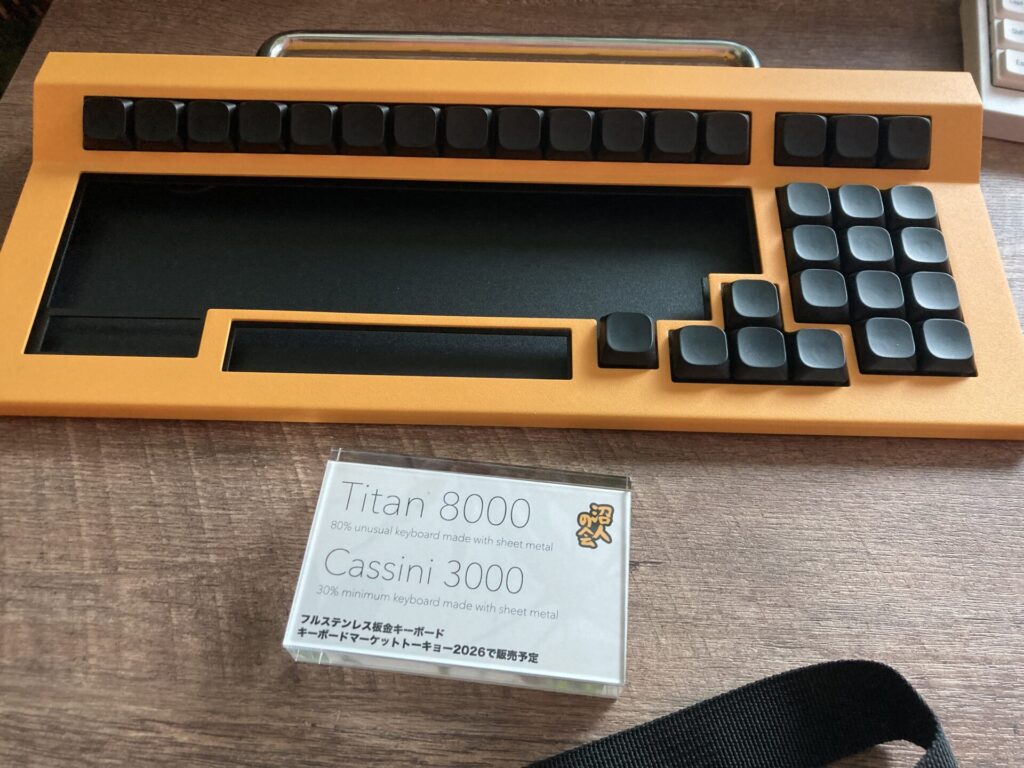
小さなサイズも
取っ手やストラップがついていています

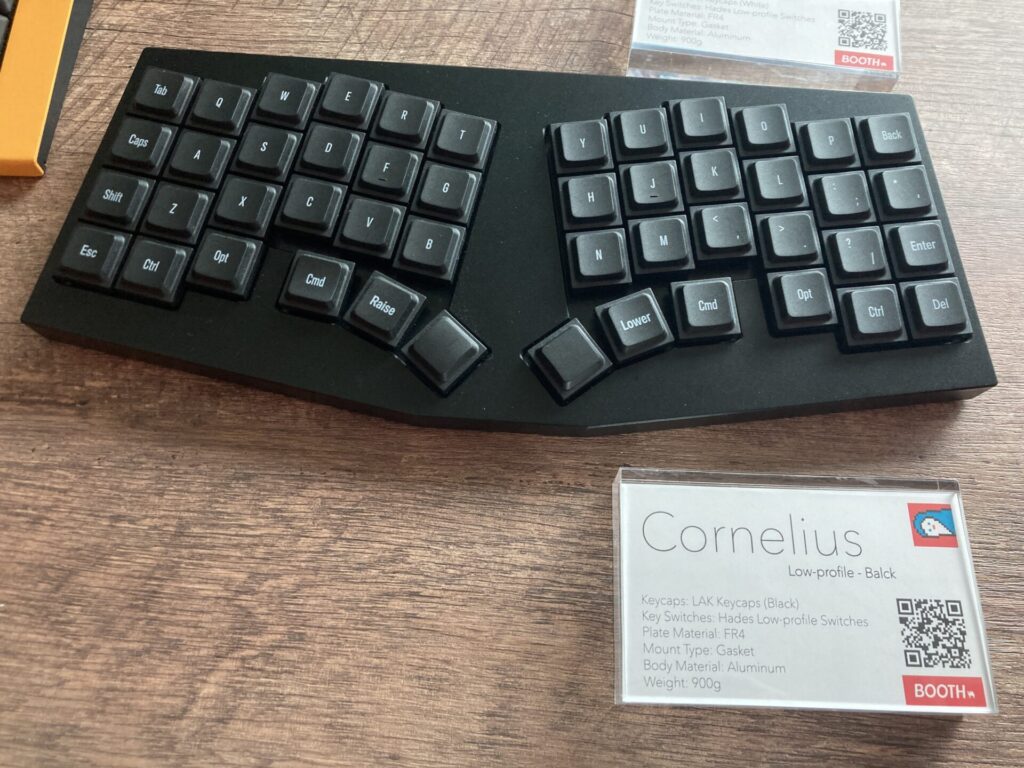
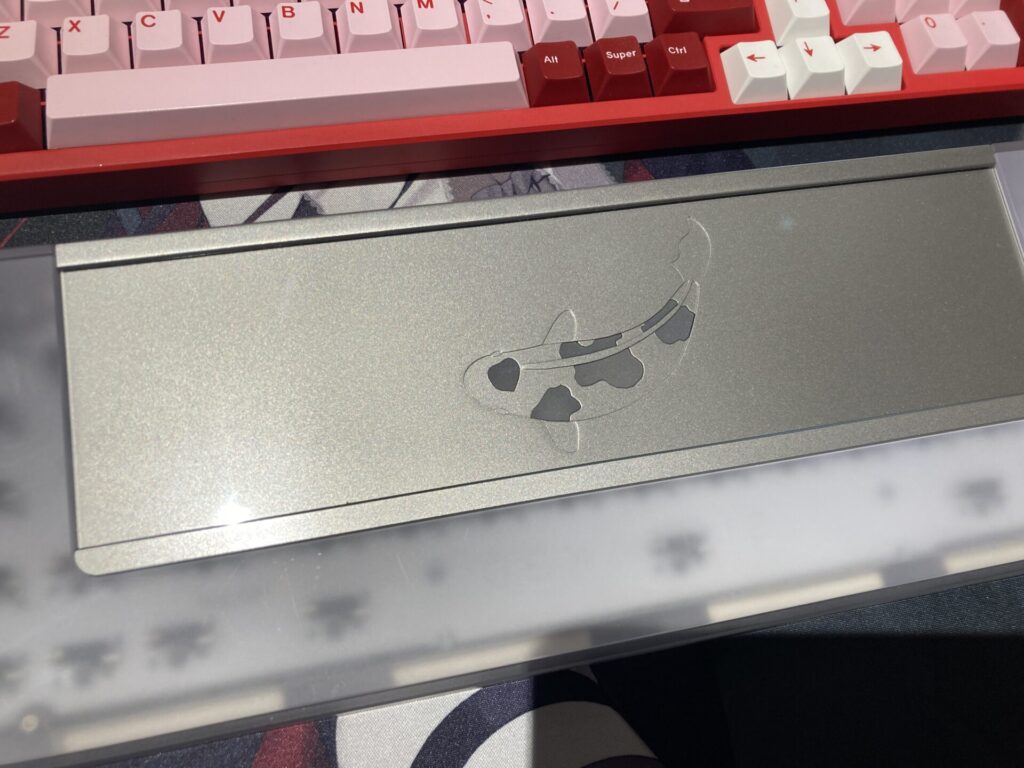
鏡面のcornelius ピッカピカです。葉っぱはデザインでなく映り込みです。

今回通して思いましたがRの小さな角もよいなと

こちらJLC板金カットのサンプルがありました。たすかる
1.5mmであればいろいろできそうです。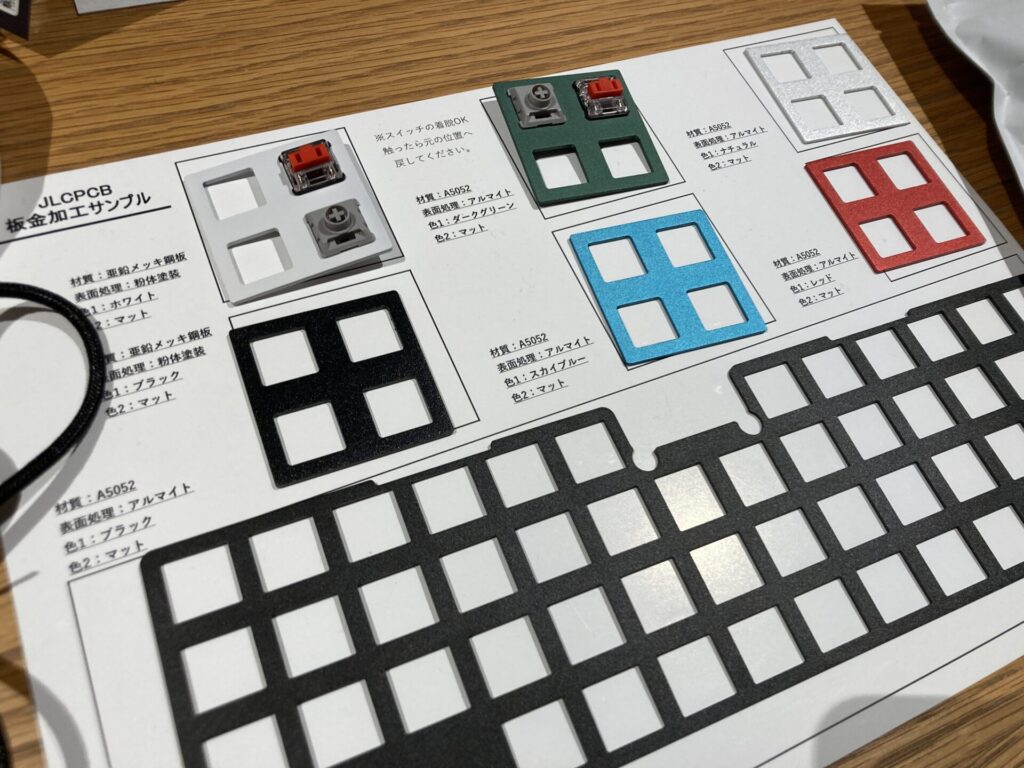
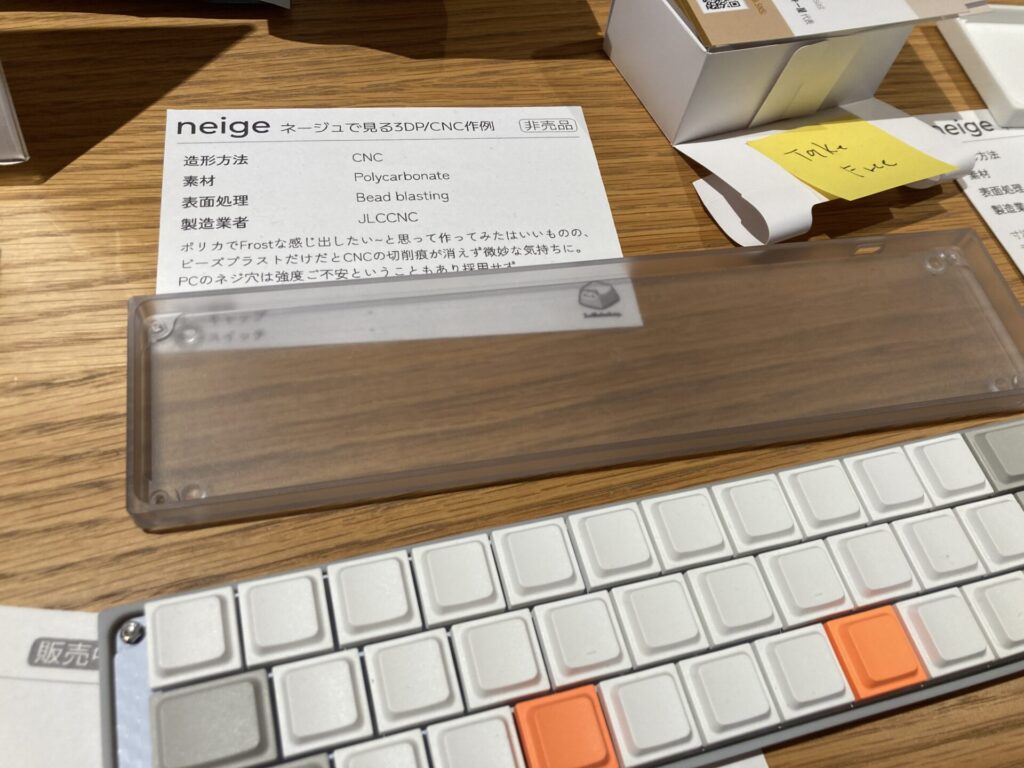
SLAケースでしょうか。かわいさのあるデザインです。

こんぱくとなqazです
PC+アルミの2pcsでしょうか
奥に角度のついた追加キーがありますね。これもかわいい
wooting lekkerじゃないか、、、
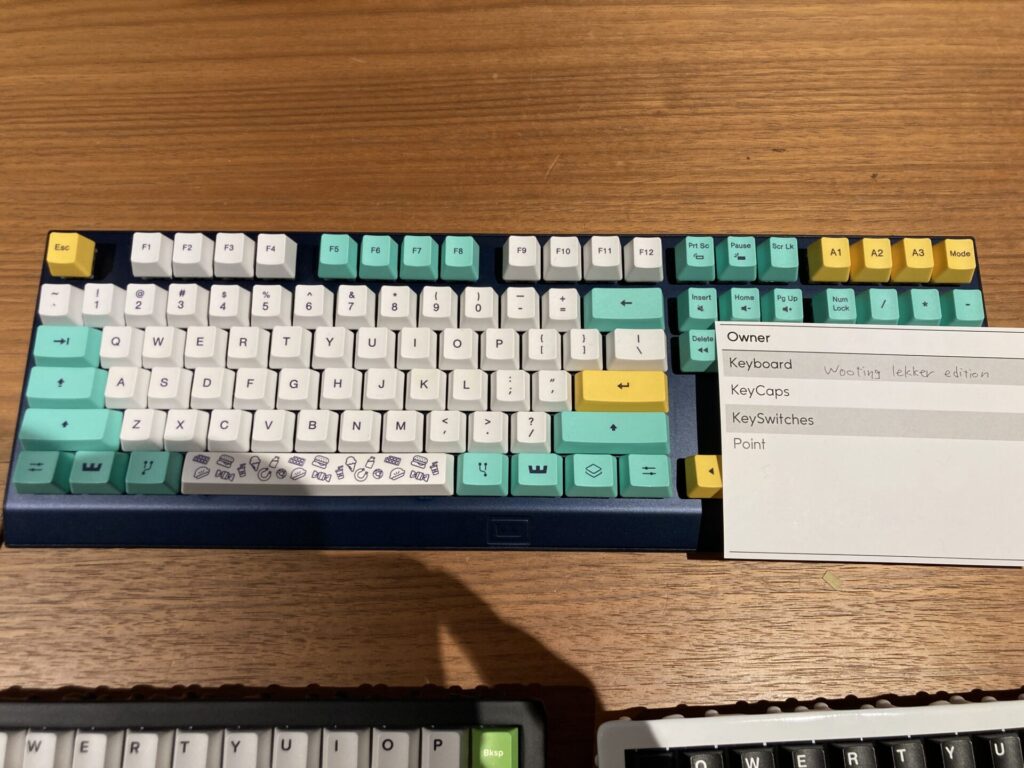
意匠がすごいですね。
本当はPCでなく金属バージョンが欲しかったとのこと。高級カスタムキーの抽選、大変そうです。
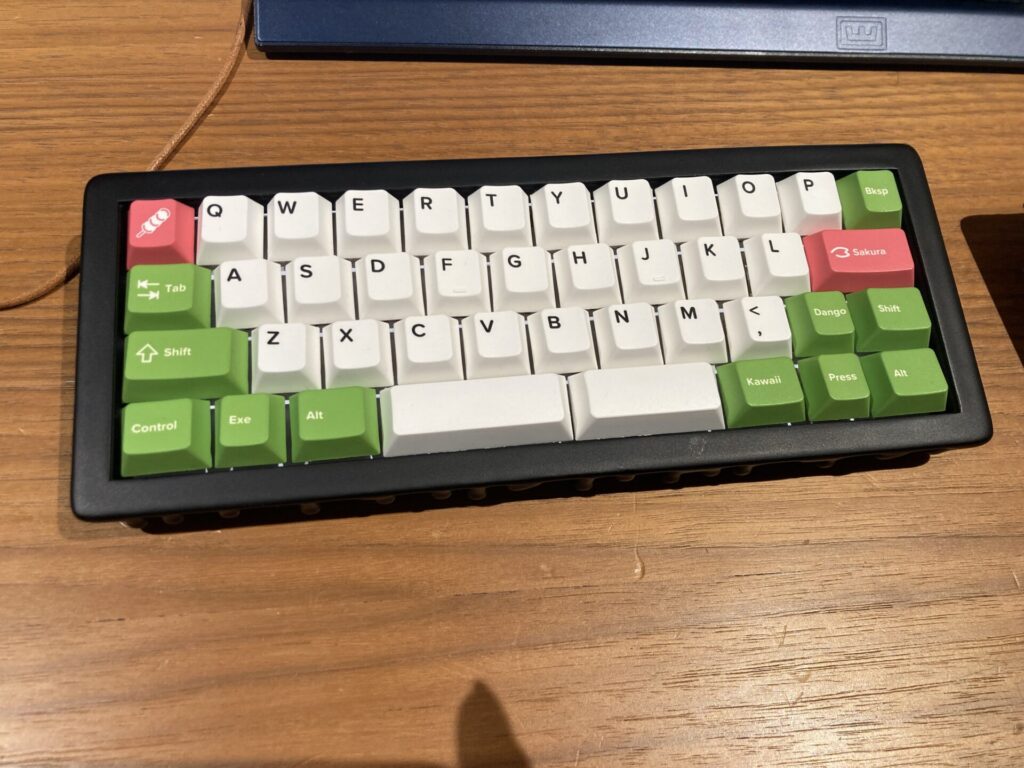
マケインキーキャップでしょうか。色々あるんですね

フルキーボードフルサイズでだいぶ重量感があります。

tofuケースだそう。色々なカラーありますね
記号を削り65%とのハイブリッドになっています。
これまた意匠がすごい
これも2pcsのよう
ケースが分かれている
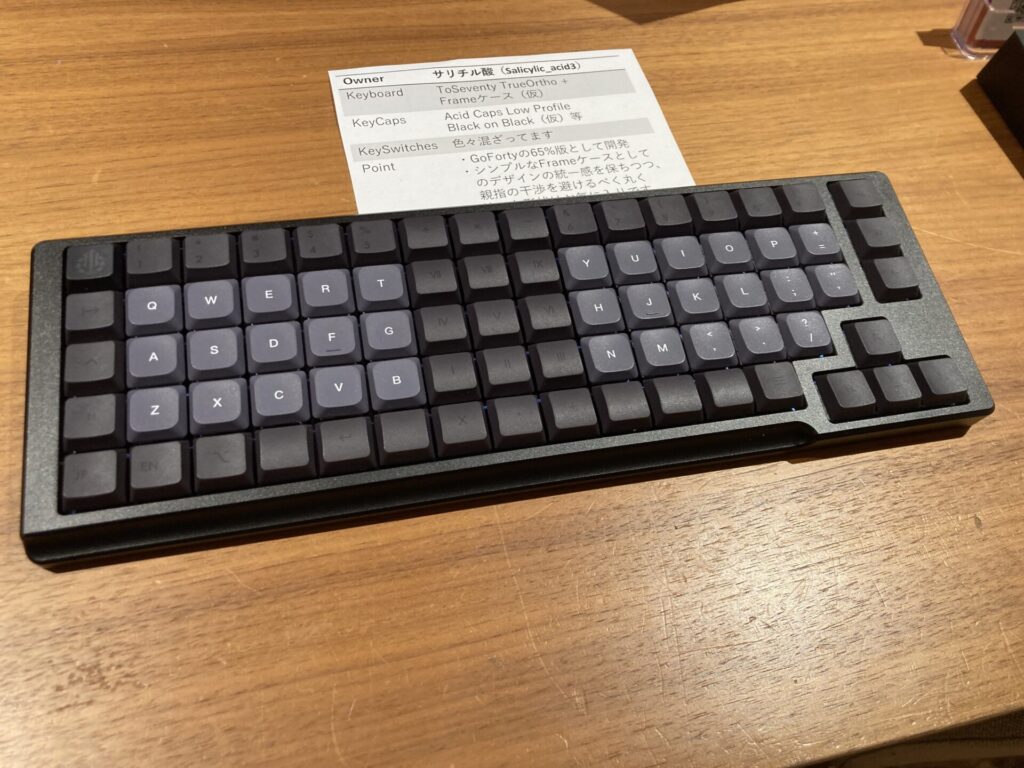
neo ergo
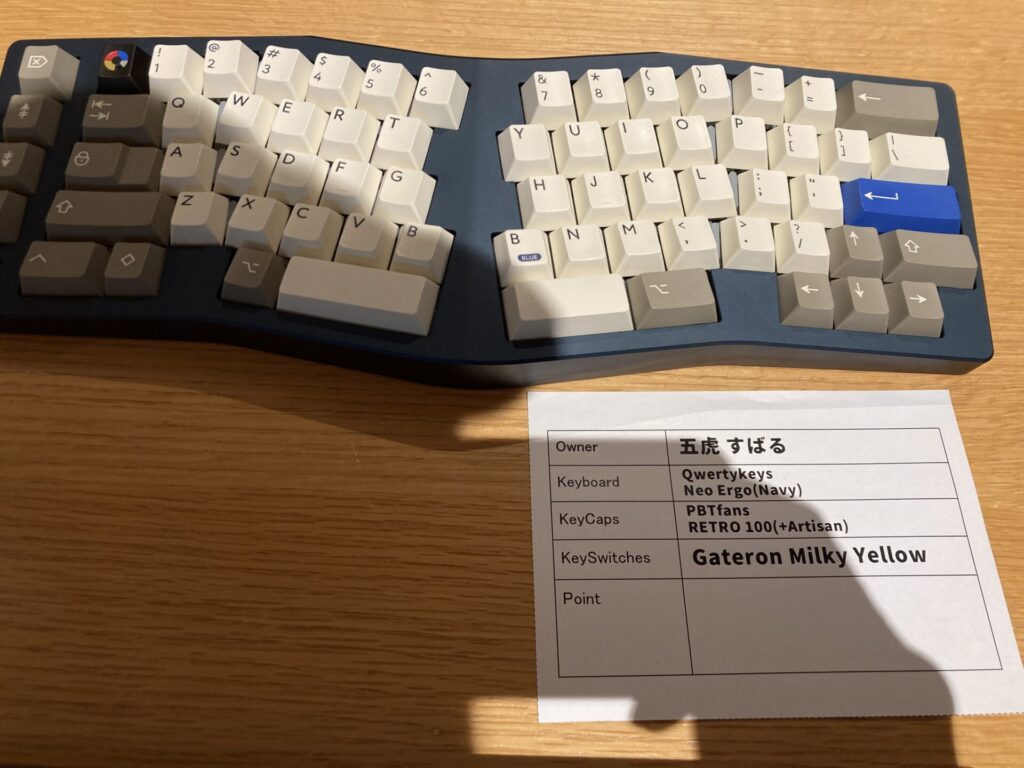
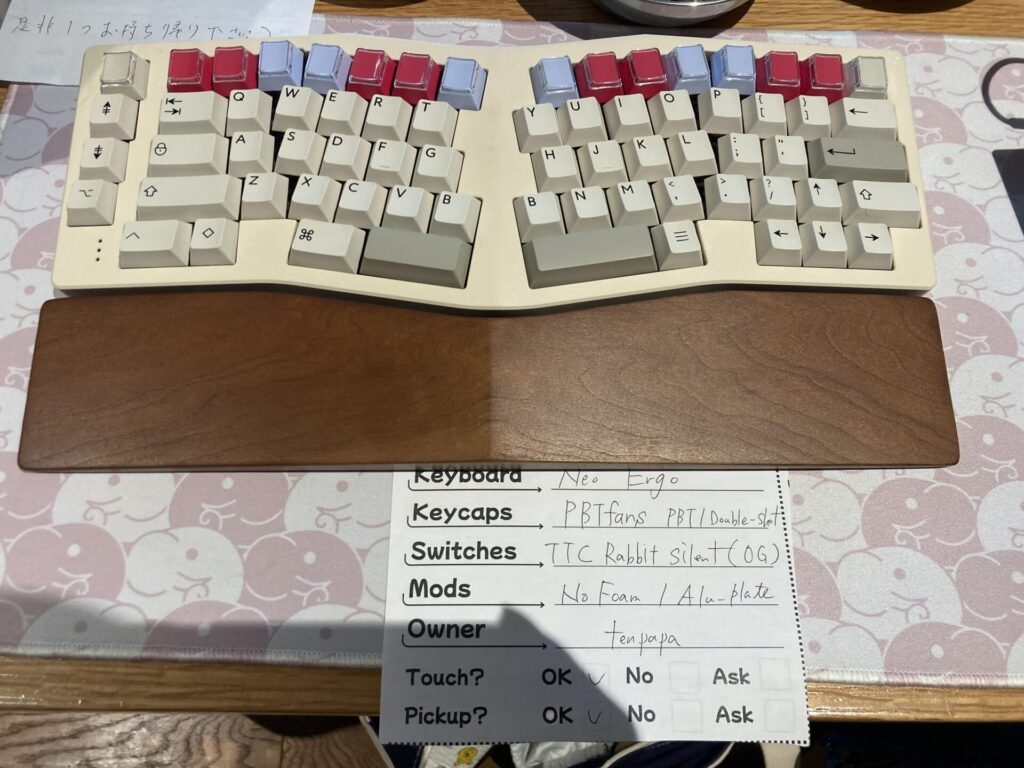
配置が面白いですが使い勝手はよさそうです。
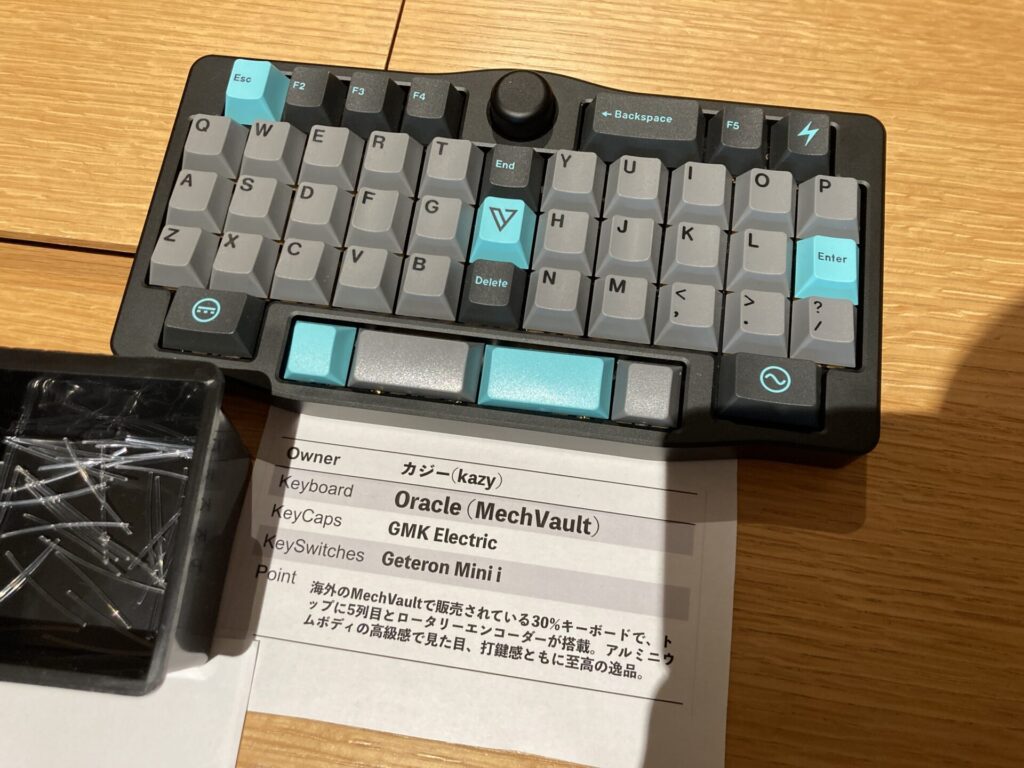
30%ながら重厚感あります
autokdk作のよう
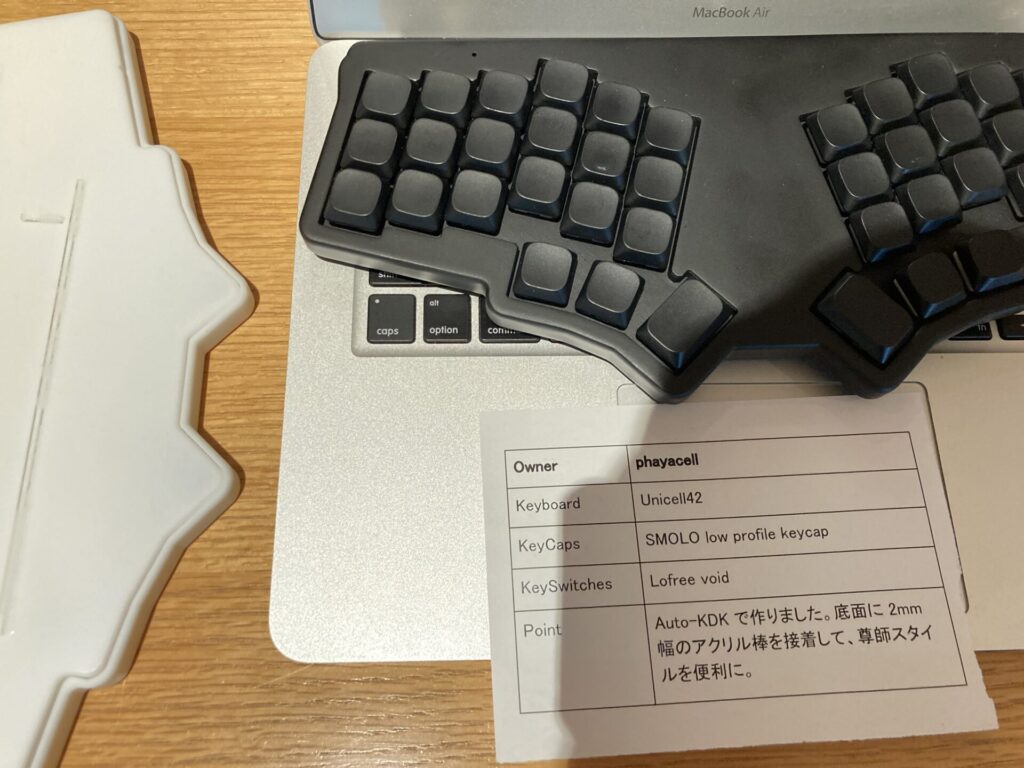
こういう縁もいいですね
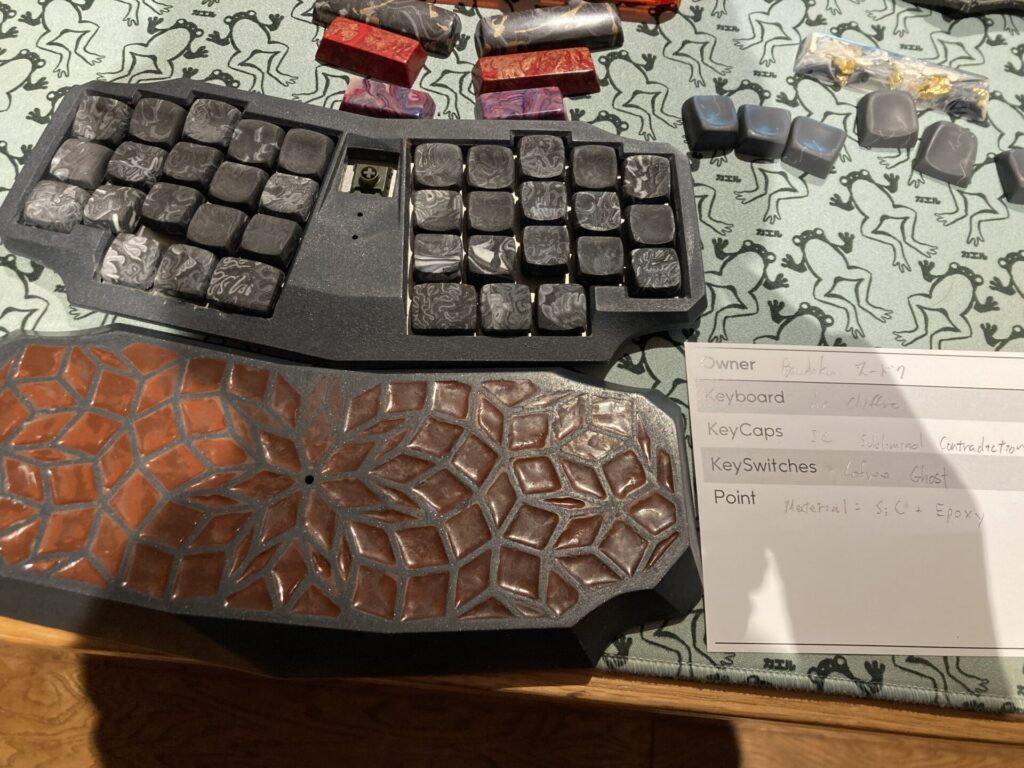
すべてが石の質感があり圧巻でした
きれいな配列です
手配線が透けて見えます


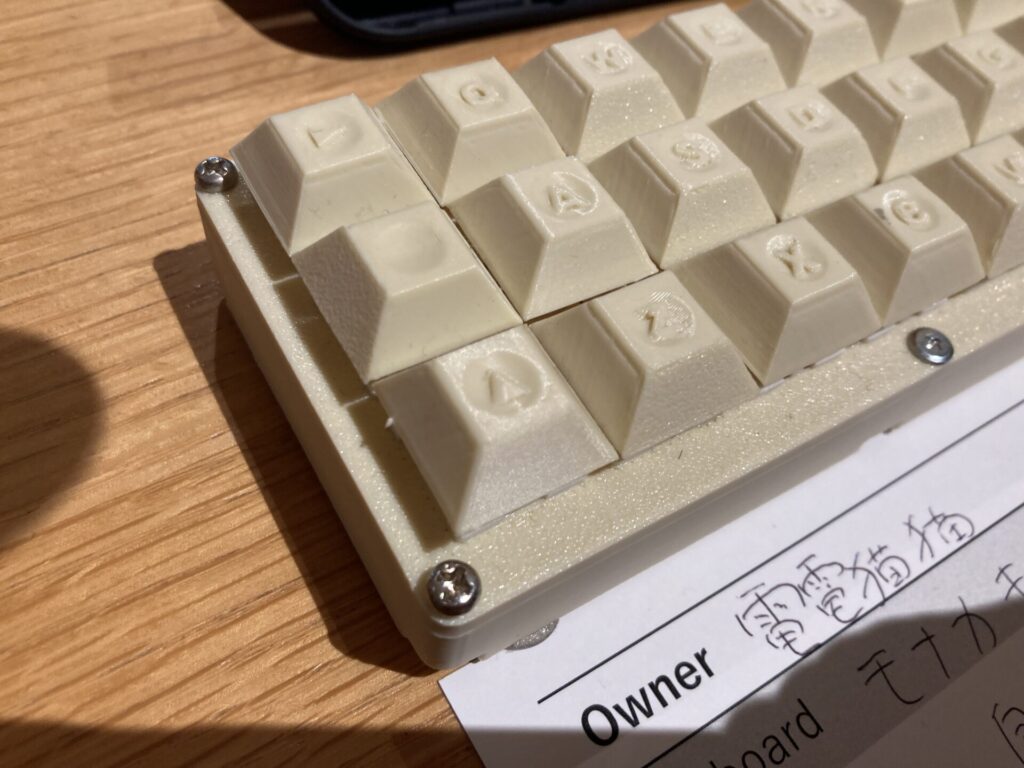
実寸大だそう
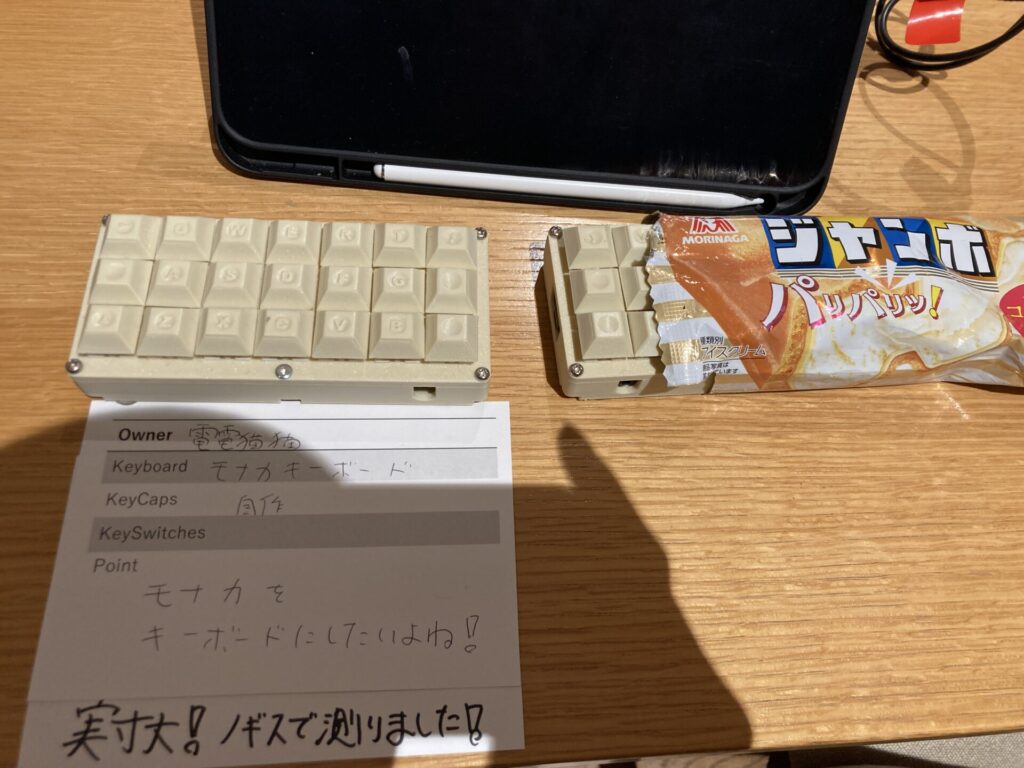
質感までこだわられています
余白。じっさい分割的に使用すると間欲しいですよね。
SLAパーツを組み合わせたケースのよう かっこいい
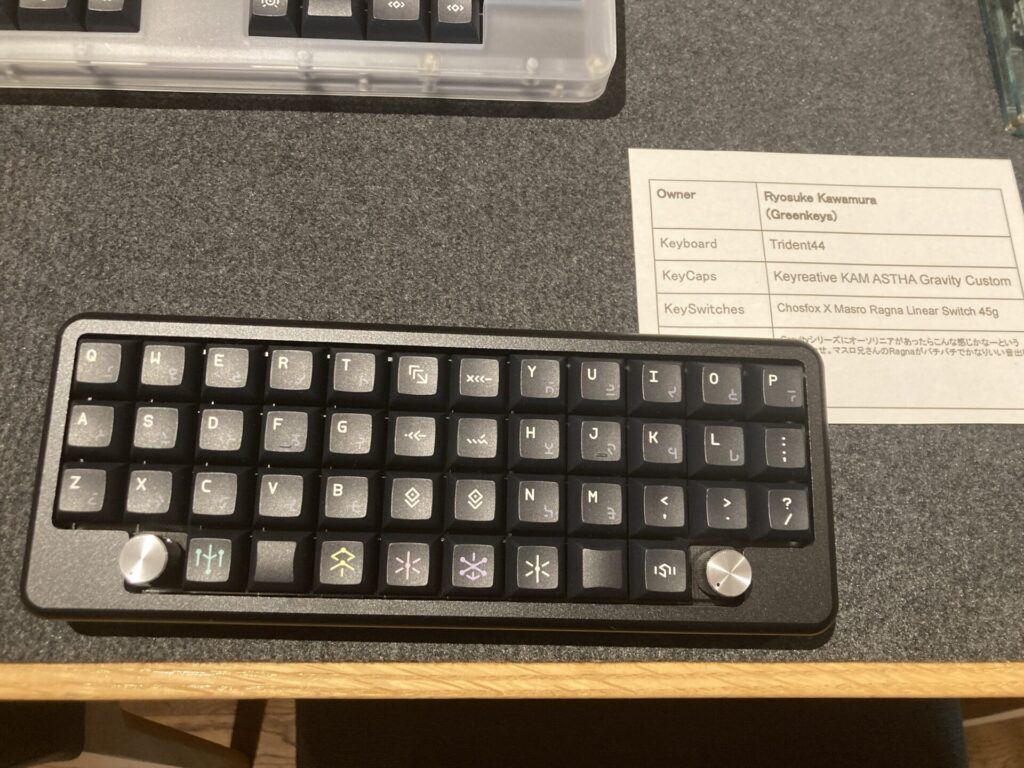
cornixのjezailさん ベゼルレスだ
40%アリスの自作だそうです
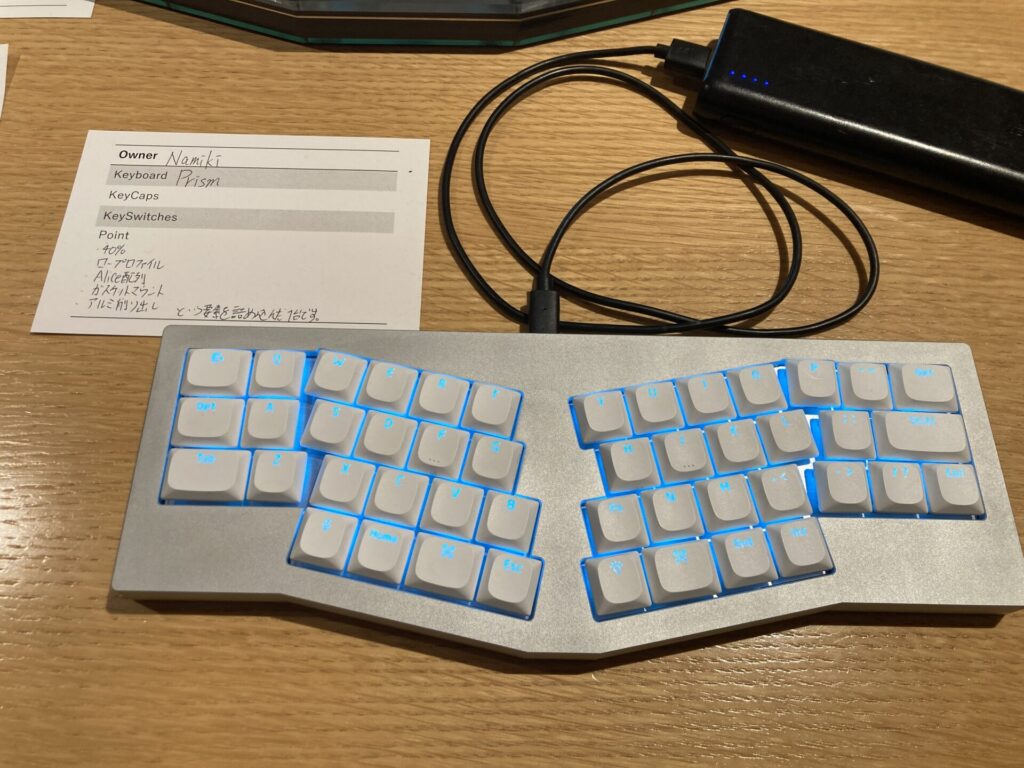
アルミ2pcsのよう
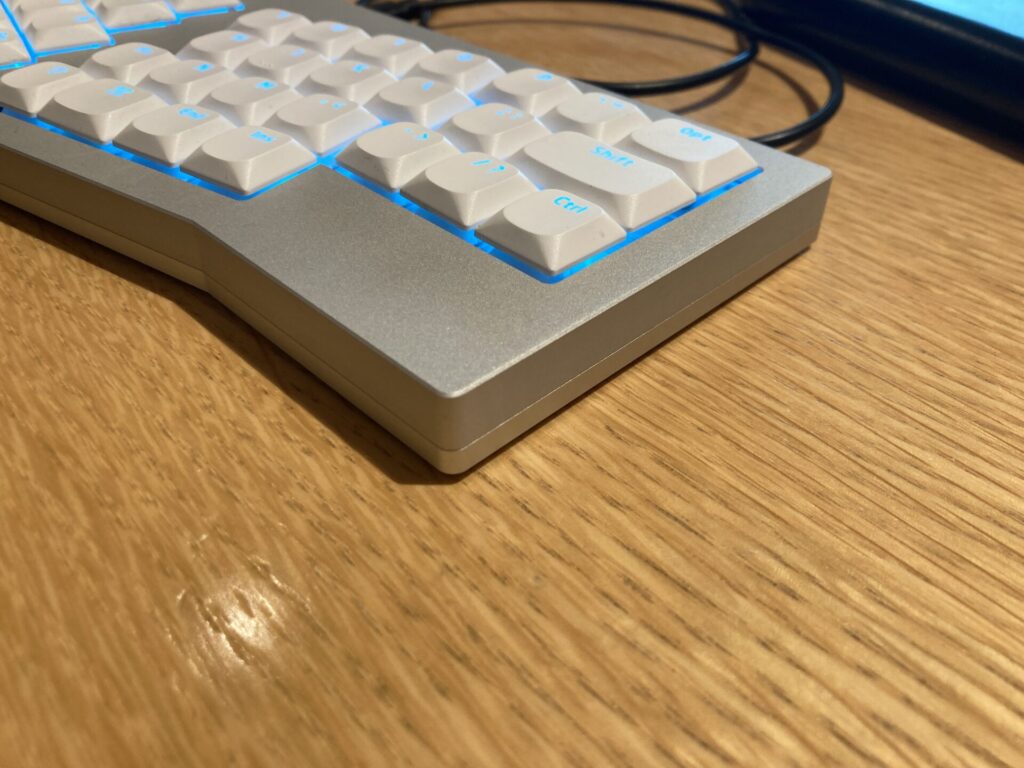
透明感のあるケースです
こちらは重厚感があります
カットの入ったプレートが透けています
打ちやすいです
構造図が示されています
背面が綺麗

ベゼルを生かしたデザインです
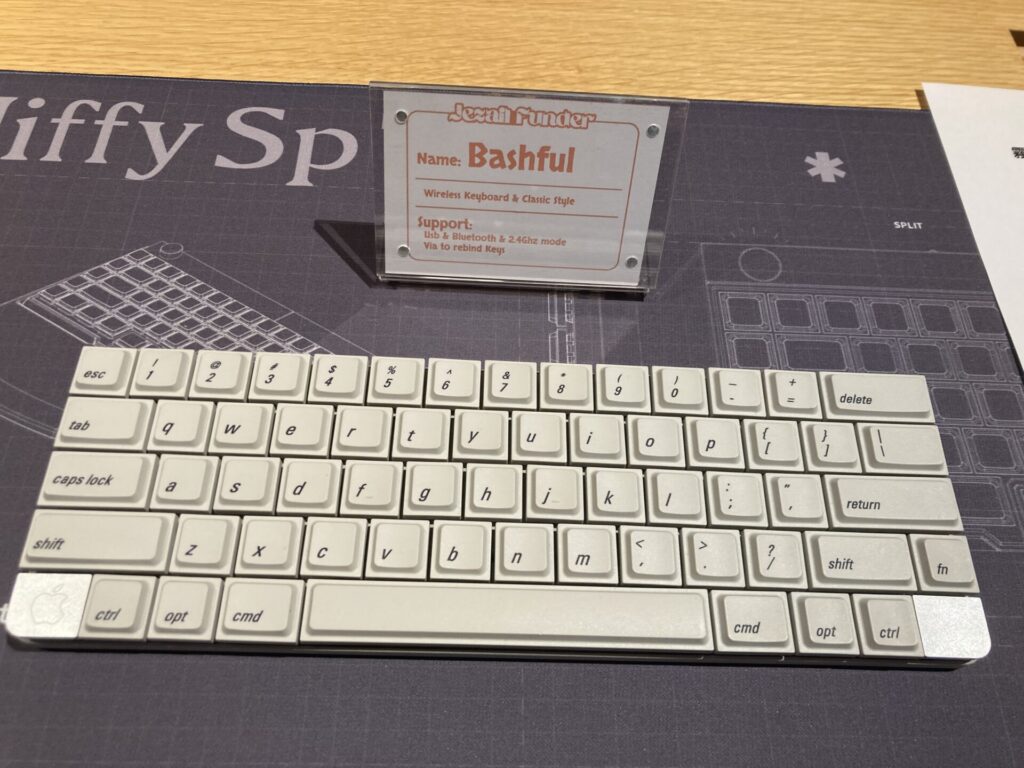
レトロです
アスペクト比がすごい

こちらも3行です
様々な素材でのサンプルがありました。助かる
ベゼルの使い方がかっこよいです
磁気キーボードのよう。tikkenスイッチよさそうでした。買ってみようかしら
アルミ感

掘り込みがすごいです


ごついケースです

fdmなgh60ケースだそうです。
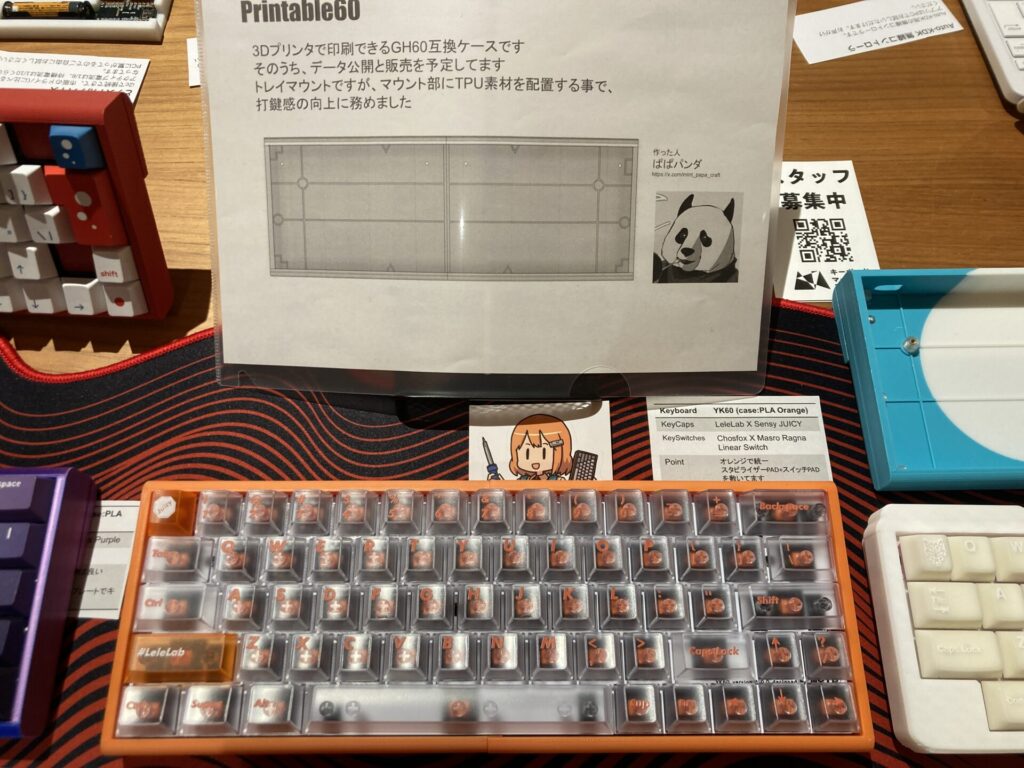
キーボードを持ち運ぶのにもよさそう
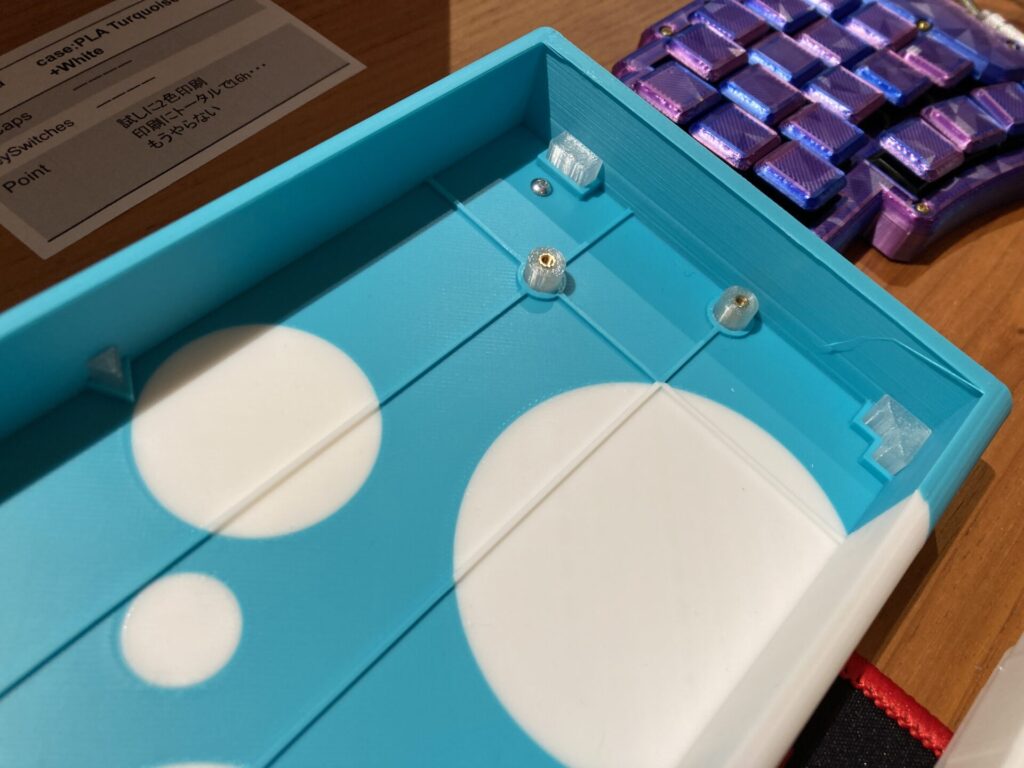
な、なんだこれは

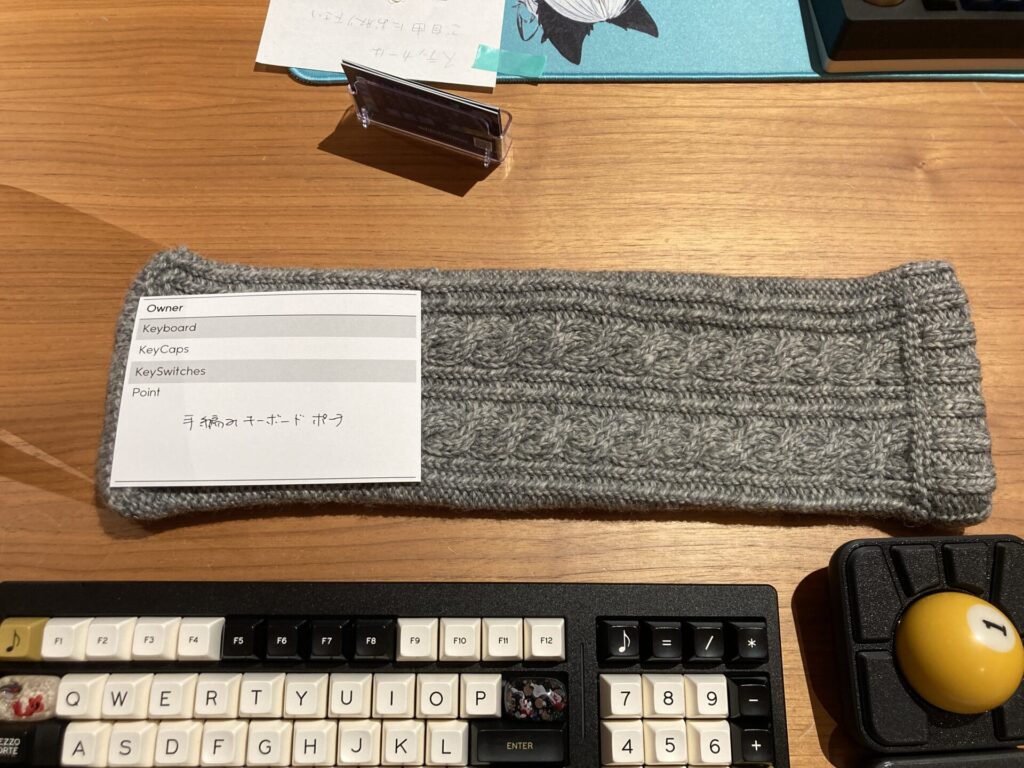
細長い。
カスタムキーボードを自作されているそうでなかなかに凝っていました。
そして重量がすごい。持ち上げてみるとでっかいウェイトが鎮座しておられました。
変形tkl
tkl
キーキャップもざまざまなものがありました


こ、これは、、、!

おわり
今回感じたことは、前回にも増して、fdm分割無線トラボ等々なジャンルと、カスタム系キーボードの数が増したなという印象でした。
ガジェット系からの注目が大きいのでしょうか。カスタム系の中で、所謂clackyなキーボードを多数触れたことは一つ刺激になりました。スイッチによるものもありますが金属中心のビルドで、なかなか気持ちよさがありました。同時に、非常に重量感のあるものも多く考えさせられました。自分としては片手で持ちあげられる範囲に収めたさがあります。
FDMを活用した作品も多く、色々と感心しました。一方で軽量ゆえの安定感の無さも感じました。これは実用上でずれてしまったりするわけではなく問題はない感の話ですし、過去私もfdmケースやnitingale ver.litで体感してきたところです。ただフル金属のカスタムとの対照さに考えさせられました。
どちらも私の造詣の深くないジャンルでしたのでこういう場で勉強できてよかったです。
持ち帰ったものとか。配られていたスイッチの名前は調べないとわからないですが比べてみたい。digiartでks-33bとchocv2をサンプルに少量買ってみました。
今回も抽選は当たりませんでした。
疲れましたね。外出自体3か月ぶりですし他人としゃべる場所に来たの年ぶりな気がします。








![[自キ]BNY6X V2 ②GH60互換60%キーボード試作品届いた](https://tsuiha.com/wp-content/uploads/2025/11/IMG_3788.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る④Nitingale B2](https://tsuiha.com/wp-content/uploads/2025/11/IMG_3549.jpg)
![[BF6]視野角と感度の設定について](https://tsuiha.com/wp-content/uploads/2025/10/image-36-3.jpg)
![[自キ]BNY6X V2 ①GH60互換60%キーボード設計する](https://tsuiha.com/wp-content/uploads/2025/10/image-6.png)
![[自キ]KS-33B Gateron LowProfile 3.0スイッチに希望はあるのか](https://tsuiha.com/wp-content/uploads/2025/09/IMG_3528.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る③修正](https://tsuiha.com/wp-content/uploads/2025/09/image-2.png)
![[自キ]チルトテントアルミケースな左手デバイス作る②ケース](https://tsuiha.com/wp-content/uploads/2025/08/image-26.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る①基板](https://tsuiha.com/wp-content/uploads/2025/08/image-24.jpg)

![[自キ]遊舎工房のレーザー加工サービス利用してみた](https://tsuiha.com/wp-content/uploads/2025/08/image-5-1.jpg)


![[自キ]磁気キーボードを作りたい。6週目](https://tsuiha.com/wp-content/uploads/2025/07/image-2.jpg)
![[自キ]磁気キーボードを作りたい。5週目](https://tsuiha.com/wp-content/uploads/2025/06/image-27.jpg)
![[自キ]磁気キーボードを作りたい。3週目](https://tsuiha.com/wp-content/uploads/2025/05/image-15-1.jpg)
![[自キ]磁気キーボードを作りたい。2週目](https://tsuiha.com/wp-content/uploads/2025/05/image-9.jpg)
![[自キ]磁気キーボードを作りたい。1週目](https://tsuiha.com/wp-content/uploads/2025/04/image-25-1.jpg)
![[自キ]50%オーソリニアのキーボード作った OSPREY59O](https://tsuiha.com/wp-content/uploads/2025/03/IMG_2343.jpg)





![[自作マウス]haste2基板を3Dモデルに起こした](https://tsuiha.com/wp-content/uploads/2025/01/image-10.jpg)

![[デスク]VESA拡張してモニターを増設した](https://tsuiha.com/wp-content/uploads/2025/01/IMG_2567.jpg)
![[デスク]充電ケーブルを天板裏に移動してすっきりした](https://tsuiha.com/wp-content/uploads/2025/01/IMG_2565.jpg)

![[自作マウス]マウスシェルモデリング その2](https://tsuiha.com/wp-content/uploads/2024/11/IMG_2288.jpg)

![[イヤホン]moondrop 水月雨 KadenzとKatoの雑話](https://tsuiha.com/wp-content/uploads/2024/11/IMG_2385.jpg)

![[オーディオ]ジェネリックER-4B化モジュールを作る②](https://tsuiha.com/wp-content/uploads/2024/08/er4switch1.jpg)

