- Home
- List
- Inuse
-
2026年2月外出、zenaim lab session他
2026年2月23日月曜日、久しぶりに東京に出てきました。の雑記です。
なんで外出したのかというと、応募して抽選が当たった◤ ZENAIM LAB SESSION ◢ ~ COMMUNITY DAY ~に参加するのが主目的というところです。ついでに秋葉原にも立ち寄り、オーディオやデバイスも試してきました。
zenaim マウスパッド
“開発中のマウスパッドを、 ユーザーと一緒に仕上げていく完全招待制セッション。 素材・形状の異なるプロトタイプを実際にゲームで試しながら、 開発担当がその場で「滑り出し」「止め」の感覚を直接ヒアリングします。”という趣旨のイベントです。
現在磁気スイッチを使用したキーボード, アケコンをラインナップしているZENAIMで開発中のマウスパッドを解説いただきながら試遊する機会をいただきました。開発中のマウスパッドに加えアケコン、キーボード、マウスの展示もありました。KS-20互換の磁気キーボードは各種イベント等でも展示されていましたが、マウスは初公開?でしょうか。プロゲーマーの意見を参考に作成した形状だそうで、試作機に触れることができました。
形状の印象としては所謂ハーフエルゴで、elecomgamingに近い思想なのかなあと感じました。(私としては握りに対しての緩急が取りづらく苦手な部類)おそらくプロゲーマーを交えての試作とフィードバックを繰り返すのでしょうから、変更などもあるのかもですが。楽しみです。
キーボード, アケコンでは自社開発のスイッチという唯一無二の強みがありました。マウス, マウスパッドではそういった強みと言いますか個性としての部分をどう見せてくれるのかなあと思ったりなどしました。ある種今回の”ユーザーと一緒に”という部分もその一つなのでしょうかね。さて本題のマウスパッドの試遊ですが、写真などは1枚も撮っておらず。というのもたくさん種類があり落ち着ける余裕が無く、試遊していたらあっという間でした。
どういった種類のサンプルがあったのか?というところはZENAIMさんのDiscordサーバーで公開されていますので是非参加してチェックしてみてください。組み合わせとしては[表面生地」「ベース生地」「裏面」の3要素あります。表面生地それぞれに対して3種類の硬さの試作品が用意されておりました。「表面生地」について全体的に目の細かい生地が多かった印象で、何となく思想が見えて面白いところです。全9種あったのですが個人的には「け」が圧倒的に良いと感じました。生地自体に張りがあり、ソールの食い込み感が薄く、一貫してリニアでスムーズな操作感です。マウスパッドのアシストは弱いですがもたつきが少なく好みでした。
おそらくマウスパッドは新品というか使い込まれていない状態だと思うので、使っていって定常的にどんな滑りになるのかも気になるところです。「ベース生地」について材質はポリウレタンのみでPORONとαセルの2種類が用意されていました。また最近ですと布マウスパッドでベース生地がカチコチなものも増えていますが、用意されていた3番目の硬度でもそこまで硬くは感じず、どちらかというと柔らかめなものを考えているのかなと感じました。またベースが硬いモデルは厚さが薄めな製品が多いですが、Zenaimさんでは全硬度で厚みは均一を考えておりよいなと感じました。生地との相性などもあるともいますが私としてはαセルのベース生地が扱いやすかった印象です。
必要があれば規格品でなく特注もありうるとは仰っていましたが、柔らかめを想定しているのであれば特性の良いベース生地など開発されたら熱いなと勝手に思います。(ソフトタイプというからにはソフトであるだけよいがソフトなものは仕上げるのが難しいと思っている)「裏面」についてporonとαセル合わせて全12種用意されていました。これはベース生地に予め施されるグリップ加工ですから、市販品などで見覚えのあるものなども当然あります。グリップ加工を多数触り比べる機会はなかなかないですから新鮮でした。ファッション的な要素の強いテクスチャからグリップ重視のテクスチャまでさまざまあり面白いところ。
当然テクスチャごとのグリップ力の違いもありますが、マウスパッドの下地としての役割もあると思うので、グリップ層自体の質感も重要な要素です。私としては見た目よりもグリップ力重視で、下地としての強さもあるものがいいなというところ。3つの素材要素に加えて、縁の加工についても2パターン用意されておりました。どちらにしても熱圧着のみを考えているようで今のところ加えての所謂ステッチ加工は考えていないそうです。
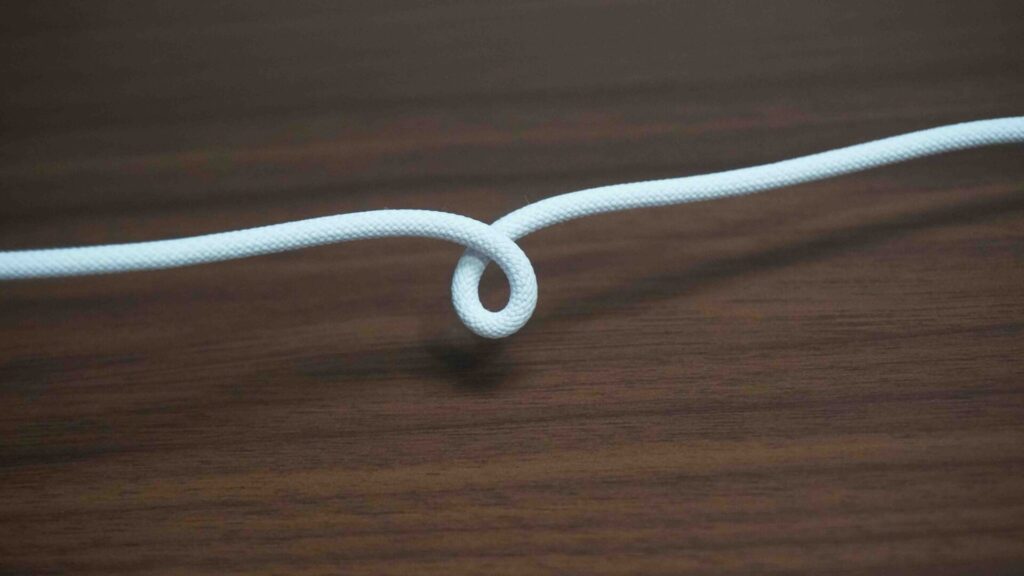
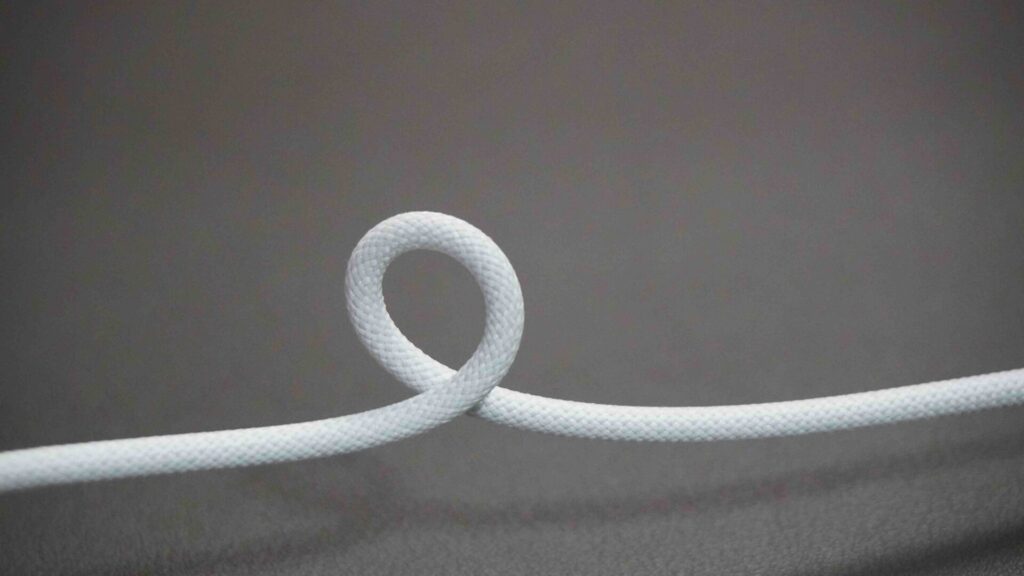
1つ目は下記画像左側のような外周がぎゅっとされているタイプ。あまり市販品では見ないですが、これにステッチ加工を加えたようなものは海外系で良く見るかと思います。縁が若干浮いているようなやつ。2つ目は下記画像右側はラウンドエッジ?アークエッジ?と言われているおっぱいマウスパッドタイプです。
私としては極論なんでもいいのですが、しいて言うならステッチ加工は無い方が好ましい(手前が袖、奥がマウスケーブルの引っ掛かりが感じることがある、作業時は手前を使用するので手首がステッチ加工に擦れる、ため)ので、zenaimさんの考えは好ましく思います。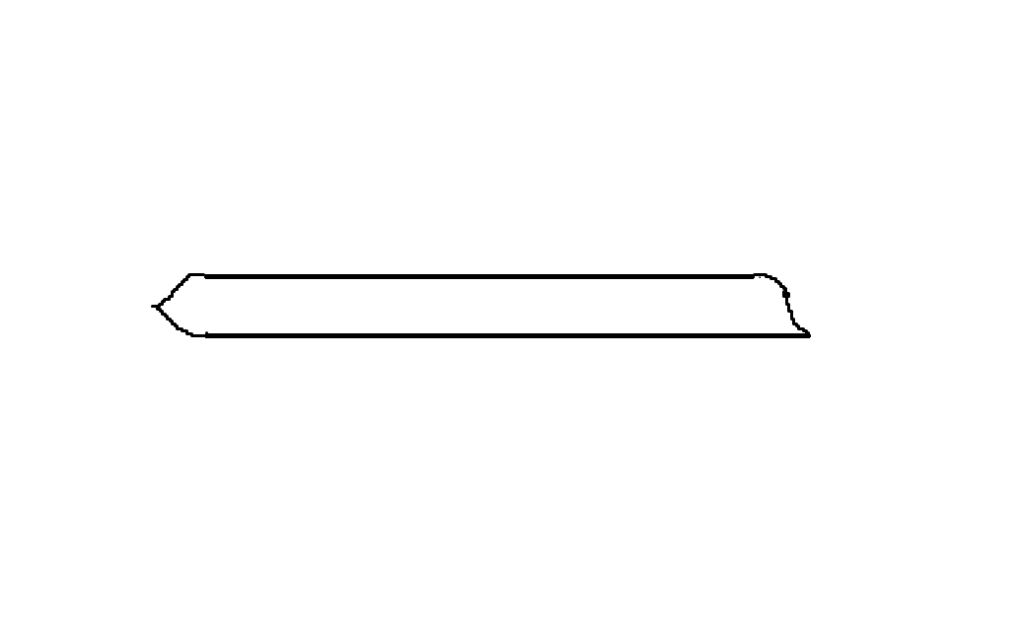
何とも伝わらないレポートで申し訳ないところですが、様々な素材の組み合わせを一挙に試す機会はなかなかないですから非常に有意義な時間でした。当日のヒアリングの内容がいくらかでも役に立てていれば幸いというところ。
マウスパッドに関してはそう遠くなくリリースされそうな雰囲気で非常に楽しみです。「け」を頼む……!磁気キーボードやマウスはまだまだかかるのかなという雰囲気でした。
eイヤ 試聴
ついでにオーディオも試聴するなど。環境はスマホ+space+has-0
店頭にsonyのxm6イヤホンが展示されていました。これがかなり良くて、雑踏がノイキャンで消えました。ノイキャン強い。音質にしてはまあいい感じというところで、特別オーディオ的な魅力はないですが結構なめらかで普通にいい音でした。
app3は装着感の軽さとノイキャンは強みですが音質はお世辞にも良いとは言えず、質感全振りです。tonaliteなどの方がオーディオ的に魅力的ではあります。そこでxm6はノイキャンと音質を両立しており外で音楽聞くならかなり強い選択肢と思いました。新製品ではないですがヘッドホンも聞けてなかったものを聴いてみたり。
Austrian Audio The Composer
ヘッドバンドの調整機構が良い感じ。装着感は側圧強くなくよいですがなんか持ったりしている。試聴機が劣化している可能性もある。
イヤーパッドは若干薄い気もするがしっかり広さがあり長時間装着していても痛みにくそう。
あまりこういう区分は好きではないのですが所謂モニターという感じで結構カッチリしている。空気感が良くacoustic的によさそう。余計な付帯音もなく高音も伸び、自然な広さがある。低域はキレが良く全体で見てもかなりすっきりしている。
かなりよくて欲しくなった。高い。そのうち機会があれば、、fostex TH1100RPmk2
装着感はfostexだなという感じ。
音はrpらしく素性のよさそうな印象。
音色はさっぱりしており響きが気持ちよい。木材ハウジングを音作りの中心に置いている分かりやすいコンセプト。木材ハウジングはどれもそうだけれど好みがはっきり分かれるよなあ。
ドライバのえっちな音が出し切れていない感じがする。低音が締めれていない(試聴環境起因なのかそういう音作りなのかどうか、)fostex th919
こちらはダイナミック機。rpから一転してダイナミック機らしい出音。めちゃ低音が強く他は優しい。音が近い。
低音強いなfocal clear
低音でかくね?
focal utopia
clearと比べると空気感良く特性もよくすっきりしている。低音でかくね?
focal utopiaというとヘッドホンの一番というイメージだったが、どうにも低音でかくて合わなかったな。イヤホンもつまんで試聴。
maestro audio stagear
SNSで賛否が分かれまくっていたので聴いてみるも、帯域バランスが壊滅的に合わず、評価以前に聴き続けられなかった。賛とも否とも言えず。落ち着いて音源も選びながら聞かなきゃわからぬと濁してみたり。
評判を見るにステージモニター的にはよいということらしい。ポップにはいい意味でなんとやらと書いており店側としてもごにゃごにゃしていそうであった。moondrop いろいろ新作とか
いろんなドライバの組み合わせが色々出ていたがどれもチューニングは完璧でいいじゃんというところ。癖に刺さるかはまた別の話ですがやはりチューニングが美しい。final s6000
あれ?いいぞこれ?S4k, s5kは水の中に居る様な気持ち悪さで聴いていられず壊滅的に合わなかったのですけど、s6000は普通に良い。知らんけど、やっぱりs4k, s5kはごにょごにょなんじゃないのかと思ってしまう。同じsシリーズでいいんか?
だいぶさっぱりしておりbaらしいサウンドに。距離感も適度にありつつ余韻もありリスニング機としてよい。ボーカルはbaドライバで前面に出し、バックグラウンドは筐体での響きが演出しているような印象。
finalはa6kもだいぶお高めですが、s6kも高い。試聴して欲しいと思いましたが中々お値段張るのでそのうち機会があればというところ。final a10000
一番試聴したかったのはこれかもしれない。高いし、ケーブル太いし、バランスだし、で買わないかなーと思っていたのですが、視聴するとやっぱり欲しくなってしまうものですね。
一聴して、速い……!r70xやcomposerとかとはまた違った気持ちよさがある。
なんというかモノの例えとして、電気信号をダイレクトに聴いているような速さがある。圧倒的に背景が静寂で驚く。残響というのではなく静寂ゆえに、余韻が残る。雑味がない。
バランスで取り回しの悪いケーブルがなんとも合わないのですが単純に音を聴くと欲しくなってしまう。デバイスなど
logicool g pro x2 superstrike?gppdシリーズはどんどん名前が長くなるな。
ハプチクススイッチを触りました。デモの連打が同行みたいなのは何がさせたいのかわからなかったですがクリック感はそこまで違和感なくというか昔の光学式みたいな感じでしょうか。
マイクロスイッチはクリック感自体がパフォーマンスに影響しますがこれはただフィードバックを与えているだけで入力とはまた別という理解なのでクリック感がパフォーマンスに影響は与えないと思っています。アナログ入力は物理的に入力速度が上昇しますからよさそうですがマウスでこれをやると誤入力が難しそうです。そこはうまくやっているのでしょうか。
静音性という意味では非常に事務向けと思います。mx masterでもこの系統で出たのでしたっけ?でもあれはバカ重いので、事務向けもこちらの方が優秀ですよね。
prox形状は使えないので、dexか2c形状で出たら買おうかなと思います。op18kv2の方がクリックが早いんだという人などもいますが、当たり前で当然ですよね。アナログ入力は指の動きに対して感度が高いから早いのですから。これはキーボードもそうですが、そういうところまで考慮しないと異なる検知方式では比較しようがないです。定量的という言葉がみな好きですが定量的というのは数字を扱うという意味ではないのですよね。

食い込み嫌いとしては気になりERRENNIR OMEGAマウスパッドを触ってきました。
表面はjetとかiceとかの系統という感じでテクスチャ無しのサラサラシート、ベース生地はsvbcやpdみたいなクッション性ない感じでした。
pulsarのブースがソフマップに出来ていてそこも見てきました。pulsarへの印象は昔のクリック感難ありで時が止まっていましたが、最近は割といい感じになっているのですね。
lggのマウスパッドもいろいろありました。マウスにマウスパッドにラインナップが多いですね
触ったことのないモデルもいろいろあり新鮮でした。vaxeeとのコラボ?のfs-1とpdもありました。
fs-1は形状のシルエットはfk2でフロントに若干高さがありs2身も感じました。
久しぶりに外出したのでとても疲れた。
zenaimのマウスパッドは今後も進展が楽しみであります。
-
26年2月買ったものとか作ったものとか
op1 8k v2 mod 中身は筋交い入れているだけの適当な構造。やはりkinzu形状は神です。
op1 8k v2基板は神ではない。ホイール小さすぎ+固定箇所無しなのでホイール周りがびみょい。素で使う気が出ないので一旦変換基板作ろうというところ。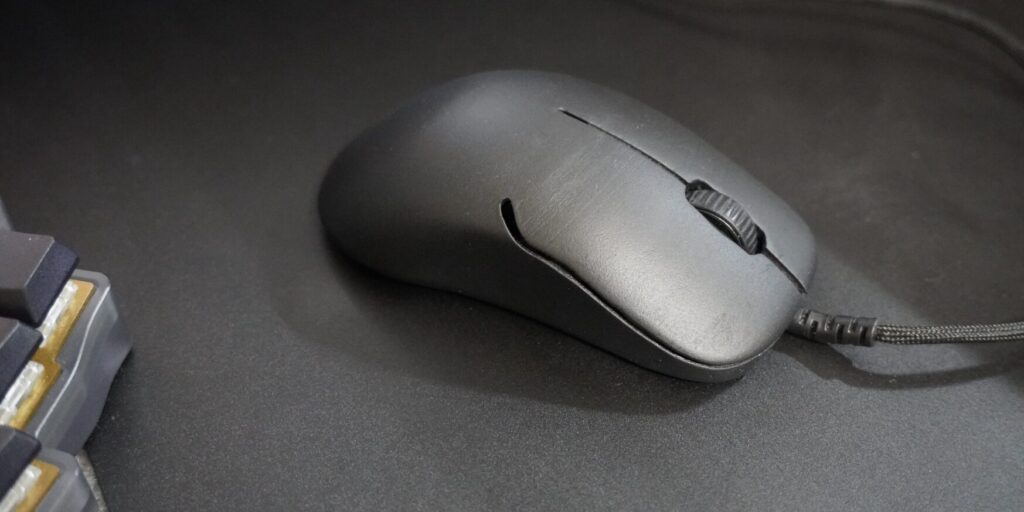
前々から言っている変換基板を作りたい所存
純正のホットスワップ基板が一生売り切れているので、これもついでに作る。ソケットの寸法合わせも兼ねて。op1自体はたぶん使うことがないので使い道はないのですけど。
磁気ポゴピンも買ってみた。これはop18kv2 modで基板をスワップするのに使おうというもの。想像以上に磁力強くてビビる。やる気が出なくて手が付けられていない。

今のところ使い道がないのだけど3950センサーも入手。アリエク3000円ぐらいして3395は1500円ぐらいなので、高い。

以前はアリエクで見当たらなかった3950等用のちっこいレンズも買っておいた。これも今のところ使い道はない。

snugon mo1とfinal b2を買った。snugon mo1は作業用に使ってみます。そのうちレポート出そうと思ってはいる。
b2はストックに買ったのですけど、丁度最近ライブ音源など聴く機会があり、するとそれ向けを謳っているb2がやはりよいのですよね。安価な部類ですから探せばライブ音源向けの機種もあるのでしょうけど、それはそれとして。
あと超かぐや姫!というアニメなぞ流行っているのが最近であります。の楽曲がリスニング機だとうまく聴けなくて投げ出していたのですが、b2合いますね。マスタリングがそういう方向でしているのかもしれません。
自作カスタムキーボードにと評判よさそうなリニアスイッチを買ってみました。keygeek y2とhmx cloud v2というやつ。y2はめちゃめちゃクリームですね。なかなか好みは分かれそう。cloud v2は結構音は大きめですが普通によさげです。
どちらも共通してトップアウト音が抑えられていてよいですね。最近のはそんな感じなのでしょうか。冒険せずvertex v1を使い続けていたのですが、これはトップアウトが比べて気になります。一方でそれ以外でいうとvertex v1不満ないじゃんという感じで依然優秀だなと感じます。
肝心のjlcに発注したカスタムキーボード一式は全然進んでいません。3週間ぐらいかかりそうだなあ。
ここらも設計したよのまとめを上げたいのですが全くもってやる気が出ません。
カスタムキーボード→op18kv2スワップmod→自作磁気キーボード→マウス基板 と行きたいですが全然やる気の出ないここ数か月です。デスク周りも組みなおしたのでちょこちょこ紹介したいところもあるのですがズルズルいくともう別によくねという感じになり。
-
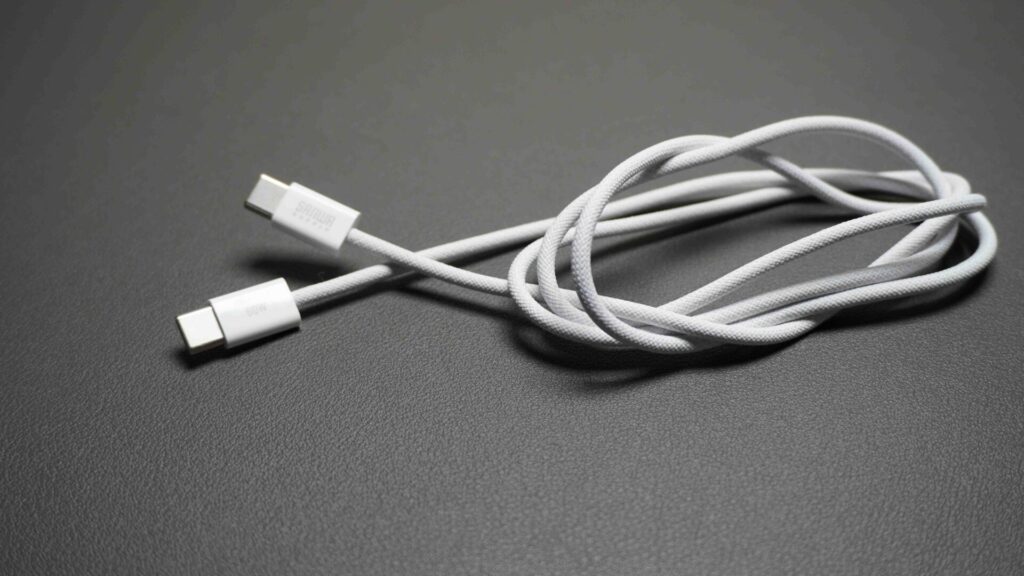
サンワサプライ USB Type-Cシリコンメッシュケーブル KU-CCP60SMシリーズ 紹介する
最近はデスク周り界隈でも、オウルテックのkatamaki リールケーブルなど散見するように感じます。
私もkatamakiを使用していたのですが、部屋のコンセプトと模様替えをするにあたりUSB type-Cケーブルの見直しを行いました。
katamakiは単純に性能面が微妙に思っていて、PD対応で電圧を上げての充電には対応しているのですがけど充電速度についてはなんかそんなに出ないなという。それでも省スペース性に優れていたので使い続けていましたけれども。
元々はゲーミングデスク1台にすべてを集約していたため、省スペースなkatamakiを使用していましたが現在はデスクを複数に分けているため、充電関連をまとめて引き出しにまとめてしまっています。すると普通のケーブルで取り回しが良いものが合うと思うのですね。
USBケーブルを漁ったりしているとAppleのC to Cケーブルなど出てきて、これがかなり柔らかくて細くて、取り回しが良いなと思ったわけです。その流れで出所がまともそうなメッシュケーブルをいくつか買ってみました。・Apple 純正ケーブル
・エレコム シリコンメッシュケーブル
・サンワサプライ シリコンメッシュケーブル結論、サンワサプライのシリコンメッシュケーブルが最強です!!
エレコムは論外でカチカチ、Appleも悪くないですが、サンワのKU-CCP60SM10M,KU-CCP60SMシリーズの方がより芯が柔らかく取り回しがよい。
端子部を見比べてみるとエレコムが一回り大きく、根元の耐久性は高そうに思います。サンワとAppleはほぼほぼ同じ感じ。
大体同じぐらいでねじってみました。
サンワ
Apple
エレコム

見てもよく分からんですがサンワがとても柔らかい。
サンワサプライケーブルで文句があるとすれば癖のついた状態でのパッケージになるので、最初癖がついている所でしょうか。
これは次流行るケーブルだ……。type-Cケーブル全部これに交換したいぐらいには素晴らしいと思います。3.0通信には対応しておらずハイスピードまでですが、そもそも3.0なんて早いけど不安定なの使わないし使う箇所は半固定するので関係ないと思う。
キーボードに接続する8k対応ケーブルとやらもappleやサンワのがシンプルな見た目に取り回しの良さ最高なんじゃないだろうか。
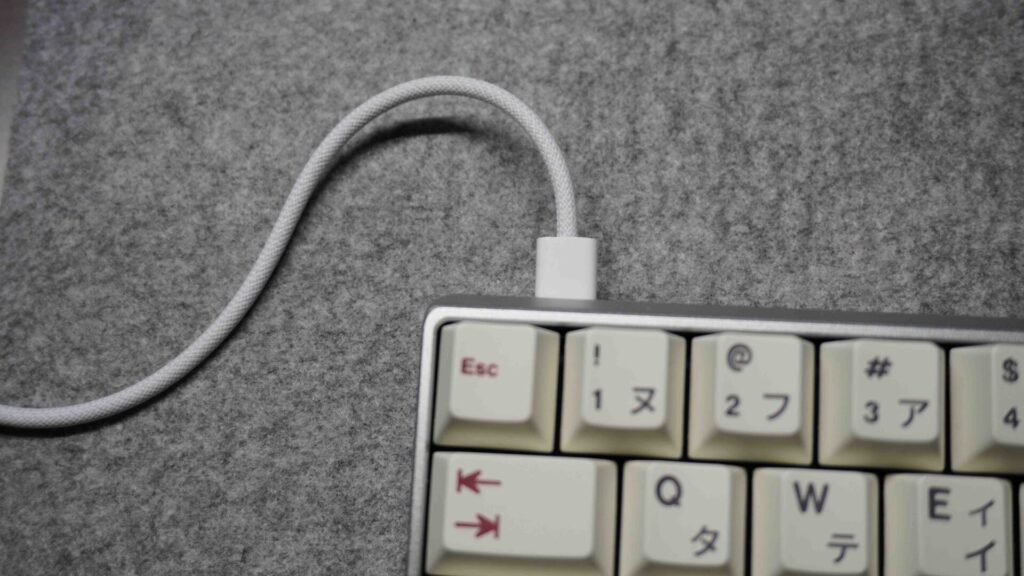
これ以外のケーブルを使う理由が全く思い当たらない状態なので1mや2mの長さが必要であれば試す価値ありと思います。QOLがとても向上しました。
-
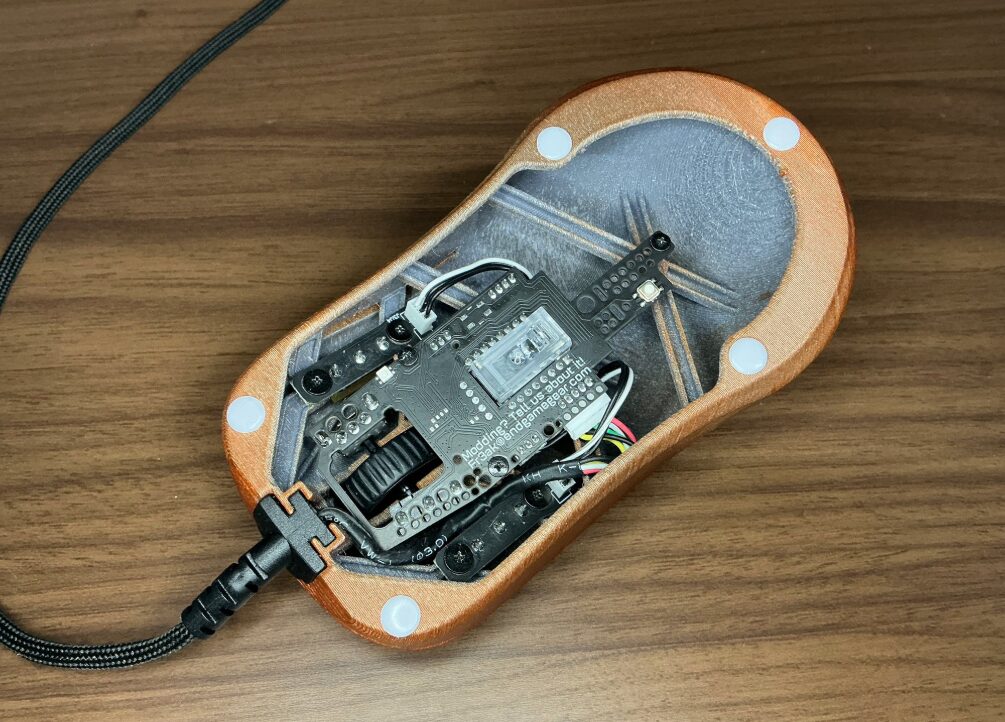
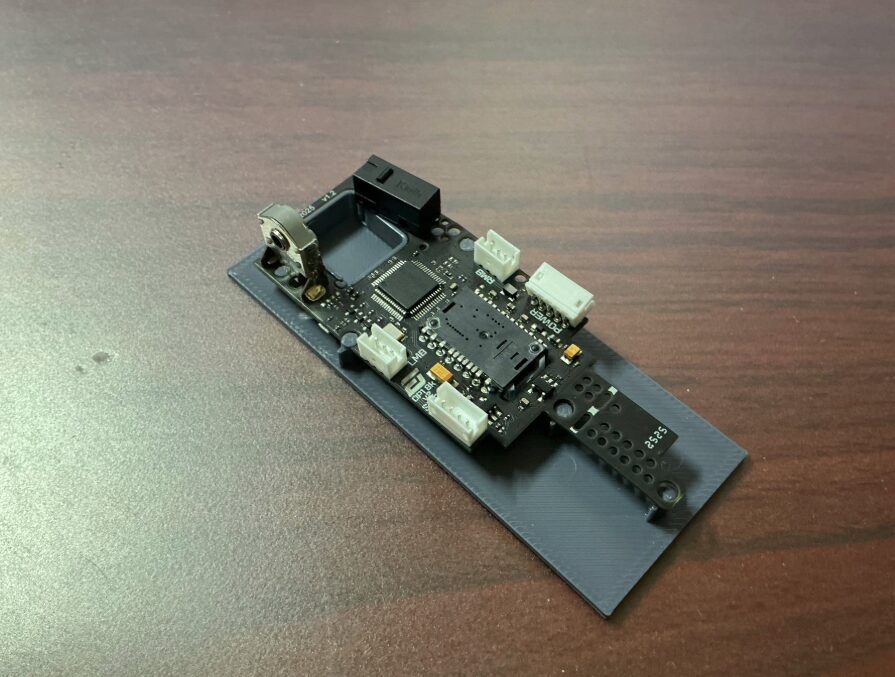
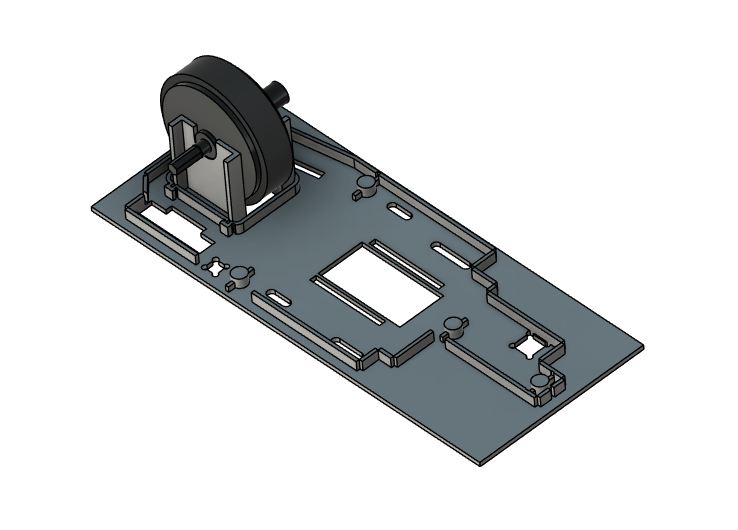
[自作マウス]op18kv2 mod①FDMで様子見てみる
endgame gear op1 8k v2 の基板をモデリングしたのでシェルを検討する。
MJF PA12は高いし時間かかるしばらつきの方向毎回変わるので、FDMでBambu Lab A1 miniにお任せする方針です。A1mini強い
最初にFDMの厚み感とかどんなもんだったかなとモデリングして印刷したものです。
積層方向を意識して、サポートが少なく、綺麗に、造形できるように意識してモデリングするべきだと思うのですけど、A1miniってホント何なんでしょうね。データ突っ込んで角度付けてスライスボタン押すだけで、勝手にツリーサポート引いて、真横の壁もきれいに造形できちゃうんだよなあ、、、
今どきのFDMだと積層とか意識せずモデリングしても何も問題ないのであるな。

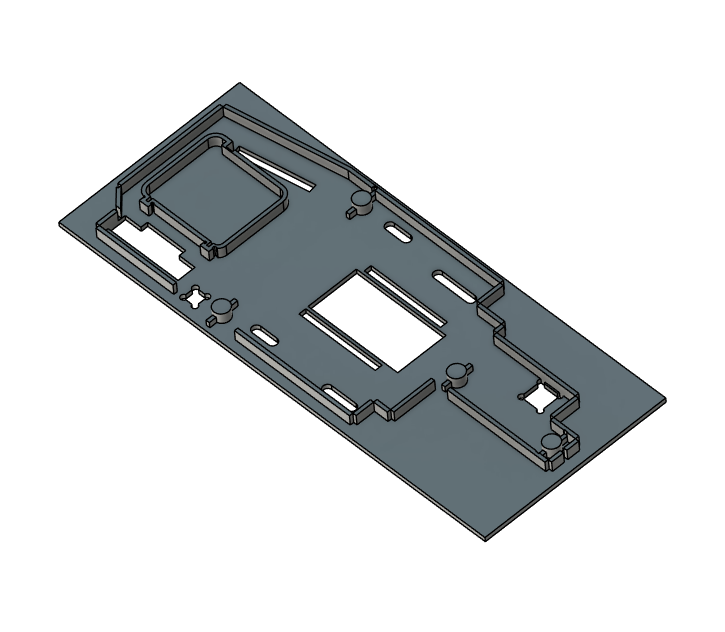
Bambu Lab A1 miniモデリング
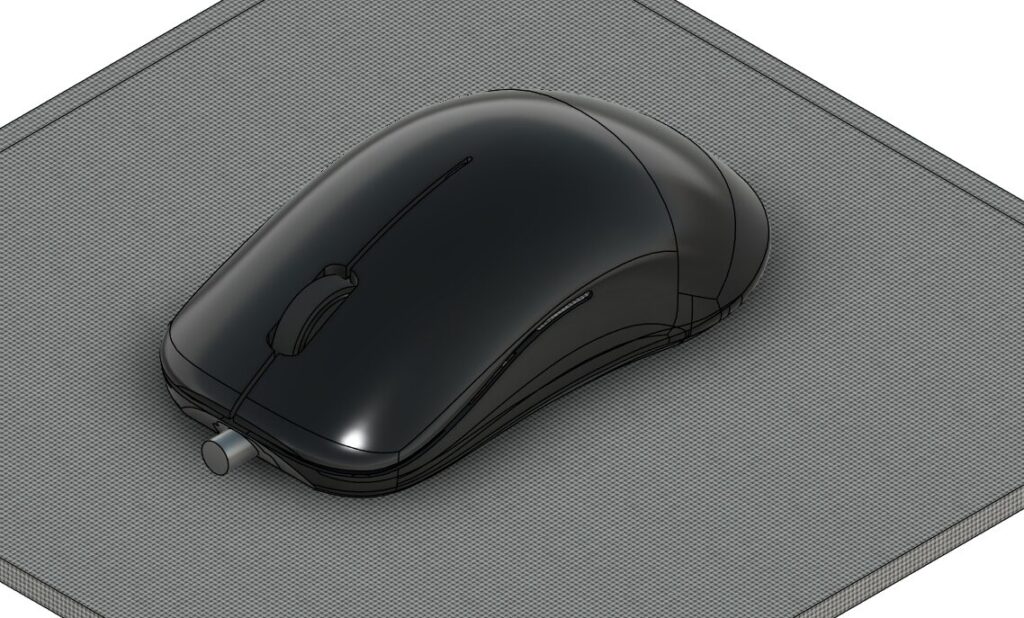
形状は例のごとくkinzuっぽいのを使います。
そこにあったから、小さくてこれに入れば大体入る、神形状と信じている構成としては1pcsのシェルを目指します。特に理由はなく何も考えていない。
MBは一体型、しかもsensei形状で丸い背なので、クリック感は限界が早そう。曲がる軸が真っすぐでないのが一体型はゴミ。
サイドボタンは無し。小さいので場所がない、載せても親指にもろ干渉する、そもそも自分がingameで使わない。方針としてはできるだけサポートレスで作れるようにしたいです。マウスの背尻を下に傾けて印刷想定で
cadはfusion使います。厚みは上側は1.2mm,下側は1.5mmとしました。意味のある数字ではないですが底が厚ければ何となくよさそう。MJFだと1.5mmで閉じていてよさげという感じだったのでPLAならもうちょい薄くてもよさそうだなと。
結果1.2mmで全然いいんじゃないかと思いました。
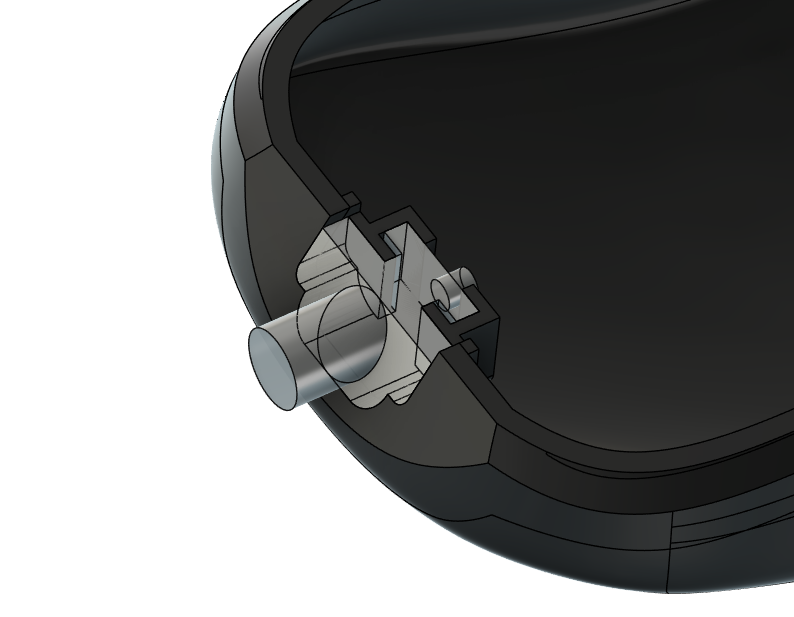
ブッシュ周りを作成。1.2mm厚で嵌まるように壁を作成しました。シェルの先端は使いやすいようにブッシュと面一でカットしてしまいました。
ソール周りを作成。φ8mmのソールが張れるようにしました。厚みは2mmとって、そこそこ硬めにできていると思います。外形は45度にして見栄えと印刷しやすい感じにしています。

MB周りをカット。側面のカットはproxタイプでなく横から入れるfinalmouseタイプにします。一体型だとこっちのが見栄えよさそう?楽に切りたいので正面と側面とから1回ずつ切る感じにしています。
サイド端の曲線は側面から刃を入れる時に綺麗になるよう、水平な線にしています。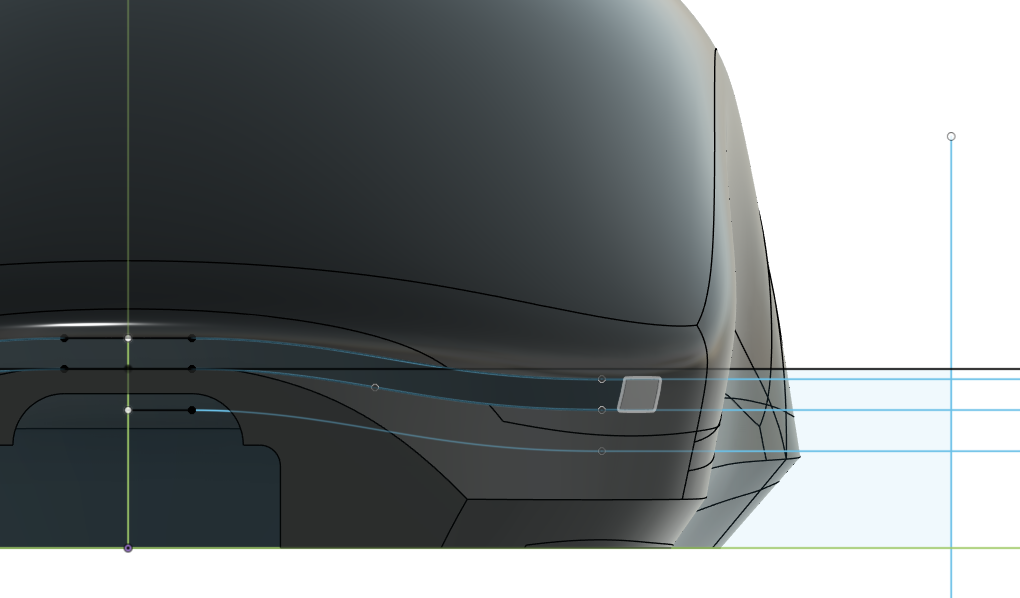
先端の背が低くて、ブッシュパーツと干渉しそうです。なので下の切り取り線の中央部はブッシュパーツと面一になるようにしました。
これより先端低いマウスだと難が出ますというかこれももう少し切り取り線下げたかったです。
op18kv2純正のブッシュはでかすぎるので、使わない方向性でやる方が小型マウスはモデリングしやすいかもしれない。このでかいブッシュを差し込めばブッシュ周りの補強になるのが偉いところではありますがでかすぎる、、
側面もMB周りの切り取り線をスプラインで引きました。端っこを水平にしていたので、そこを始点にしてオフセットすれば正面の切り取りと合います。
水平カットしている角っこがべったとした印象にはなるのですけど、切り取るのにこれが雑で簡単かなと今は思っています。
1.5mm幅切り取っていますが根元のところは沈みませんから、細くしていくようにしてもいいのかもしれない。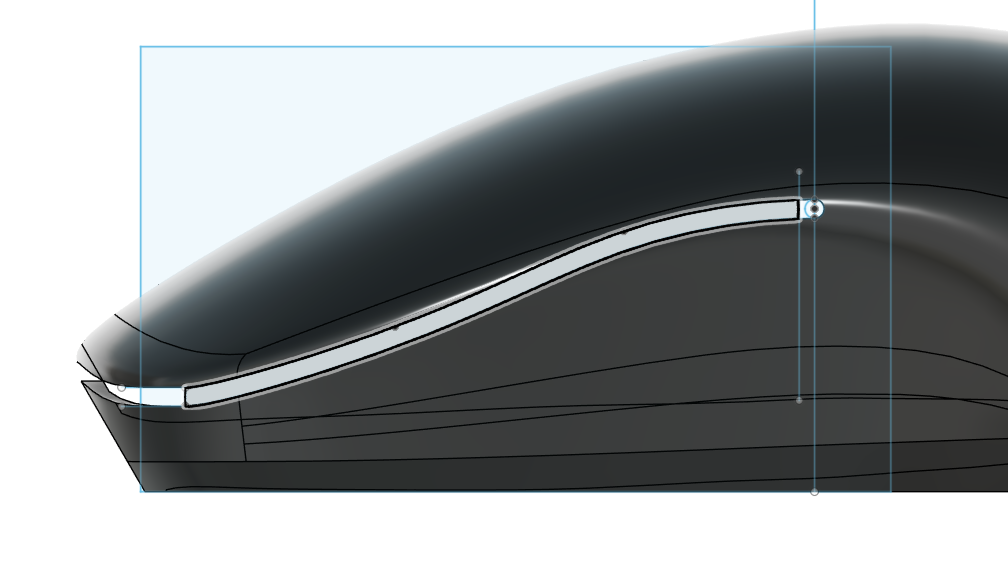
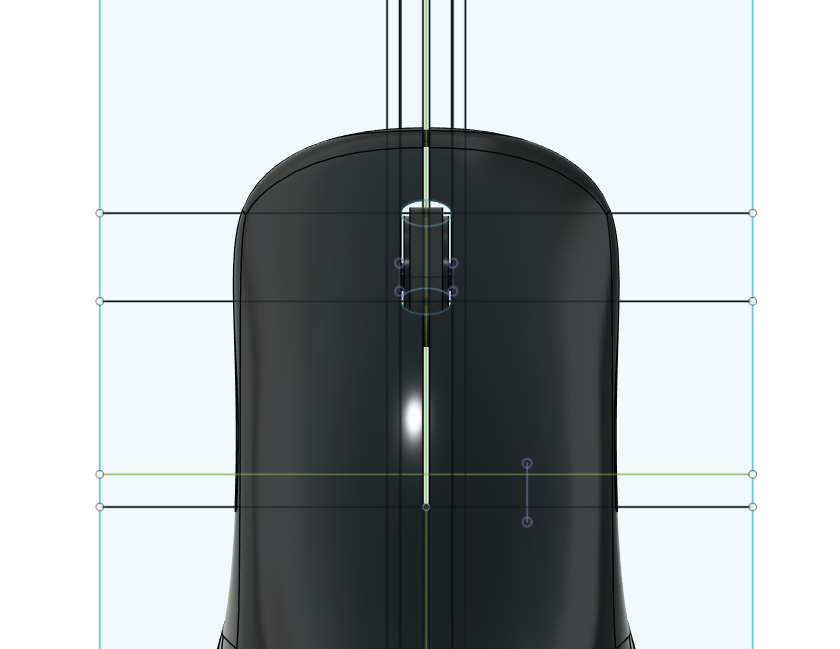
中央もホイールをよけながら分割しました。これは鉛直に切り取りましたが、ホイール周りはホイールからオフセットして内側から切り取ったほうがいいのか、悩みます。
後方のメイン基板ねじ止め部を作成しました。基板のしっぽの部分は使わない方が多いと思うのですが、サポート無しで印刷するため壁を斜めにかけようとするとzhコネクタケーブルがあるためめんどくさくて、こっち使えばいいやという感じです。
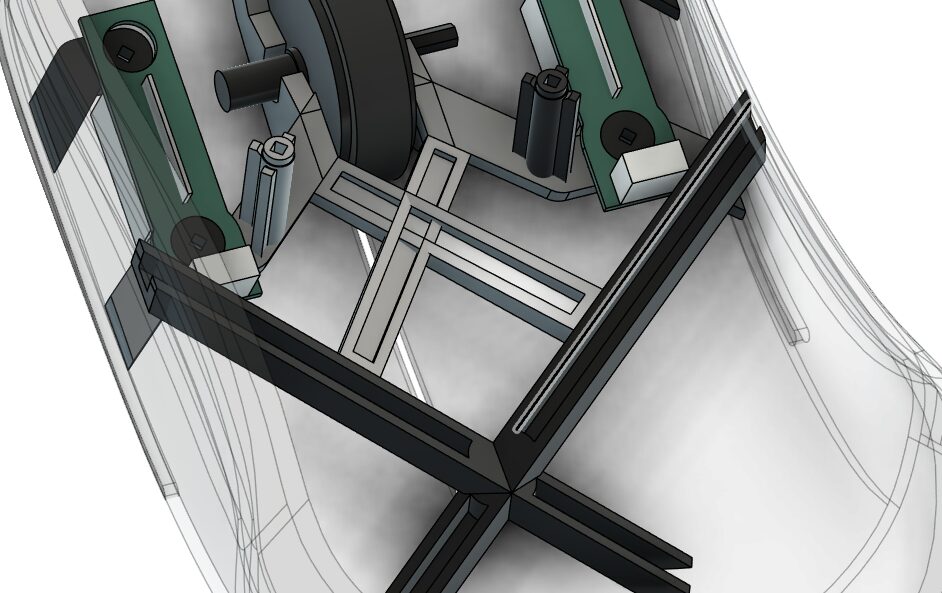
別件でtokiryoさんに教えてもらい気づきましたがv1はそもそもしっぽついてないみたいだし。4mm四方の棒を1mm厚でシェルしたもので筋交いしています。何パターンか試して、強度的によさげなところでした。
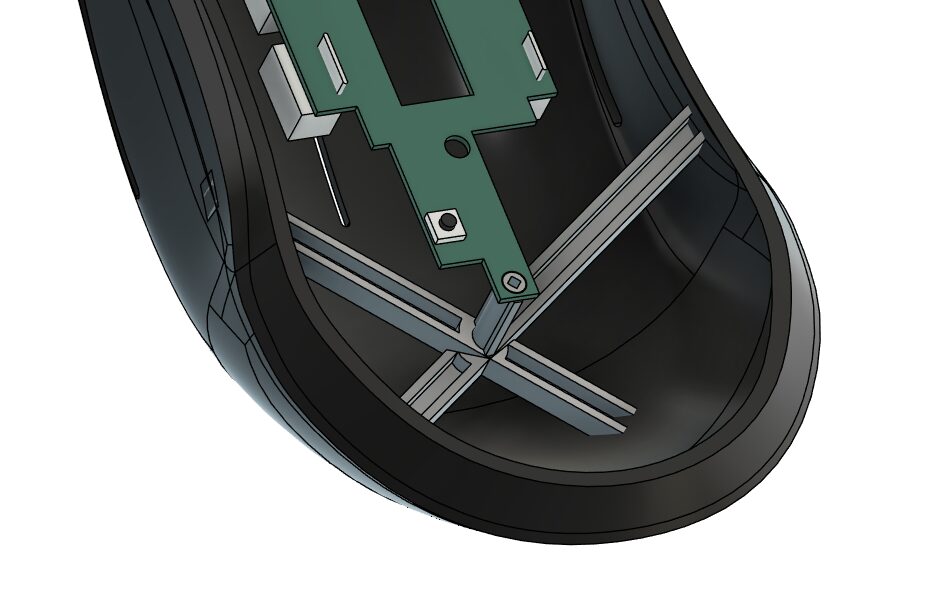
中央当たりにも補強で同様に入れています。斜めに壁を立てるだけではだめで、やはり交差して筋交いさせるのが強度的に大事そうかなと感じました。
その時は色々つぎはぎしていたのであれですが、ここから真っすぐ中央寄りのネジ穴に通せばよかったかもしれないです。後方は補強なくてもソール部あるのと曲率大きくて大丈夫ですしね。
メインスイッチ周りを作成します。これも印刷方向を考えて、斜めに作りたかったのですが、マイクロスイッチが邪魔で、一段出来ています。
後方は解消できそうですが、すると本体との接続部の高さが合わず面倒だなとなったので
先方はそのままマウス先端に突っ込ませました。後方はホイール周りに接続させようと思います。
メイン基板のねじ止め部も生やして接続しておきます。

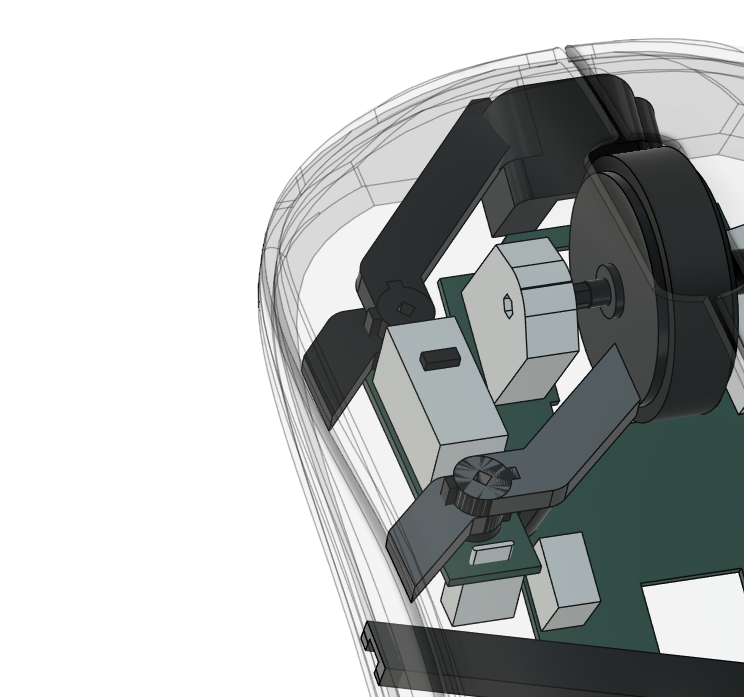
ホイール周りを作成します。ブッシュパーツとメインスイッチ周りとに接続するようにしています。
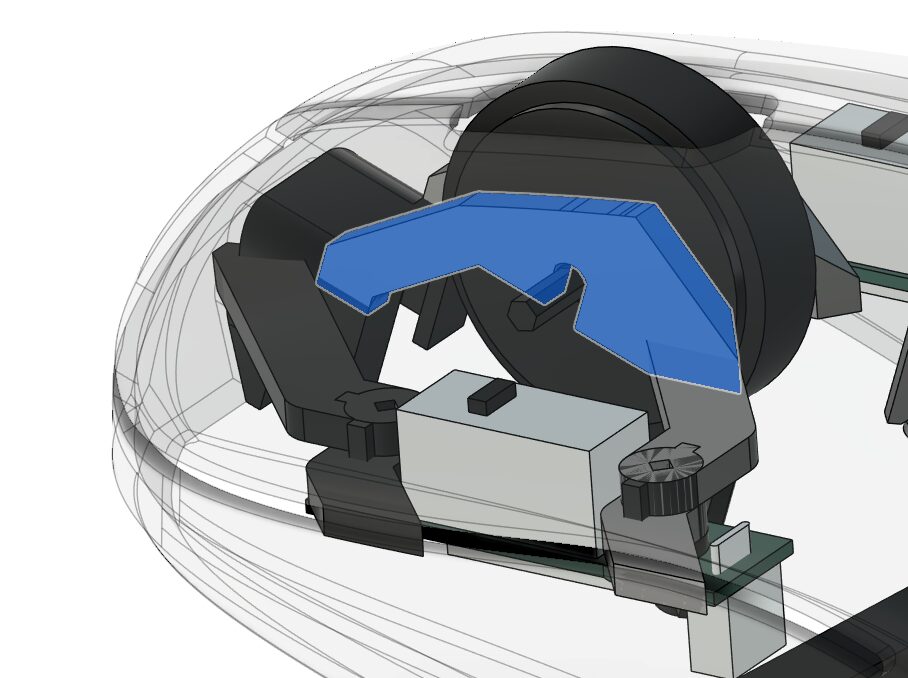
これだと当然ホイール後方が弱くなってしまったので、こちらも筋交いを入れ補強部と接続しました。
メインスイッチ周りとシェル側面の接続が不連続だったのでフィレットして滑らかに接続させました。

MBの根元を薄くして、ヒンジを作成します。6mm幅で掘っていますが、これくらいがちょうどいいかなと思いました。
厚みについてはA1miniのスライサーが勝手に2層分にしてくれるので、その厚みに強制的になります。
MB部も厚み1.2mmだと当然ふにゃふにゃでクリックできないです。これでは純正kinzuと一緒ではないか。+1.3mm厚の補強をしています。2.5mm厚のシェルを作って鉛直に抜いています。
どれくらいの厚みでどの程度補強入れるのが適切かはわかりませんがいい感じな気はします。
メインスイッチ周りがサポート必要になってしまったのですが、ツリーサポート生やされても邪魔なので、自前で立てることにしました。なんかこう、雑に

全体的にフィレット掛けたり嵌め合いようにオフセット入れて完成です

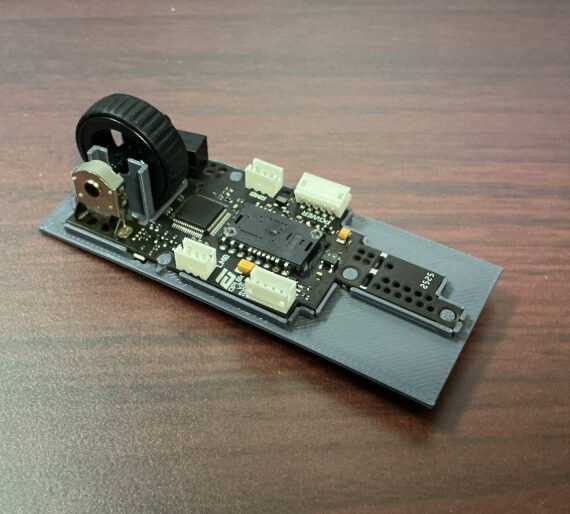
印刷
右下に出ている修復を押さないとスライス後にデータが一部消えるので注意する。見逃して何度かやらかした
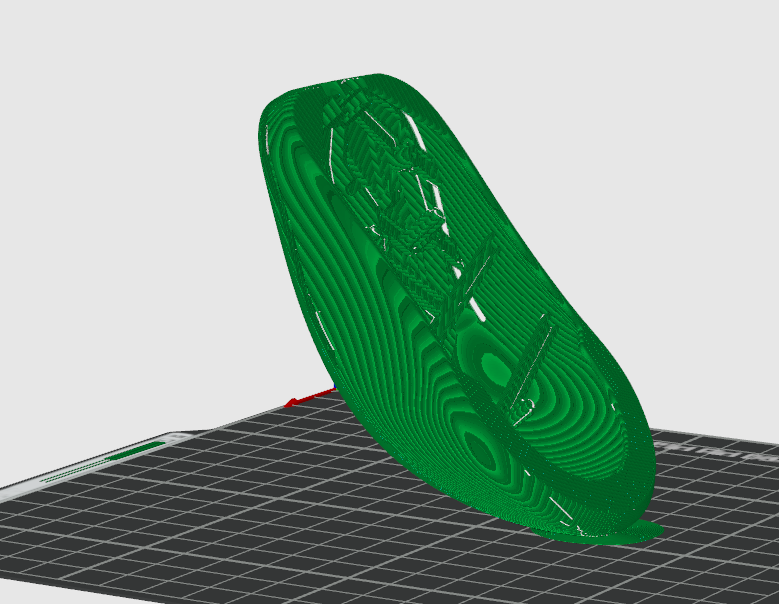
130度傾けて印刷するようにしていました。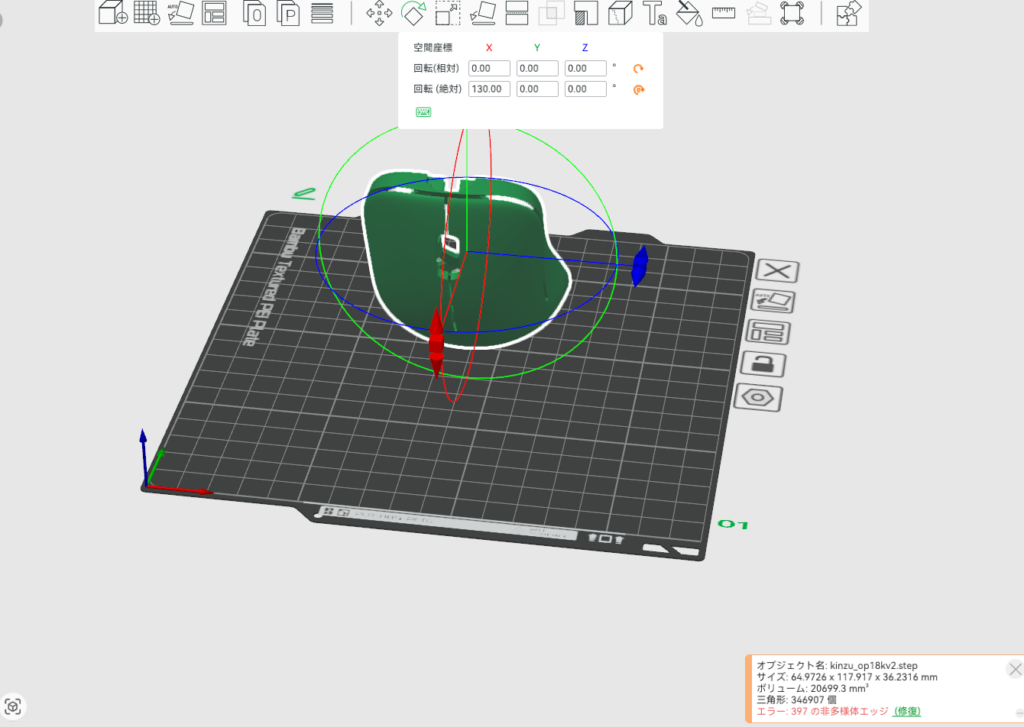
これが箱出しででてくるa1miniやべえよなあ。bambu以前だと3dpのオタクにならないと使いこなせなかったのが品質に詰められる部分があるとはいえ今は何もせず失敗無しだもんなあ。
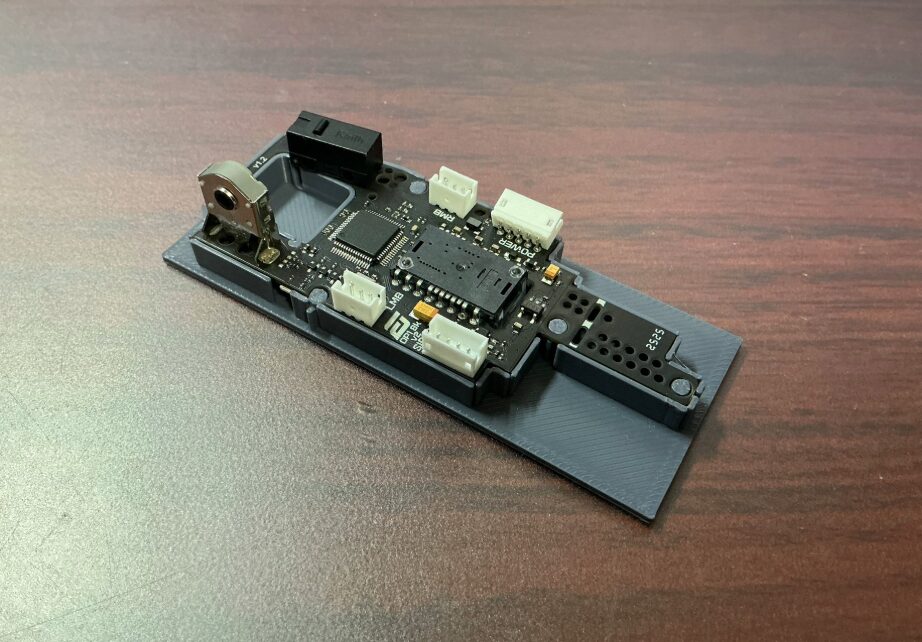
印刷ボタン押して2時間後。

どうせグリップテープ貼るので、底の積層痕荒い尻の部分だけアイロンで均すだけでも全然いいのですけどどうせなのできれいにしようかなと。
荒いところや造形のずれている部分をuvレジンとやすりとサフとで整えてみました。

ラッカースプレーぶっかけました。なんかオレンジのしかなかったので、透けてますね。
フィラメントの色とか塗装の色とかちゃんと選べばイイ感じになりそうな気がします。裸で使うならPLAのつるつる感はちょっと微妙なのでこっちのがいいかしら
ソールもPLAだと剥がれがちなのでこのほうがいいかしら
おわり
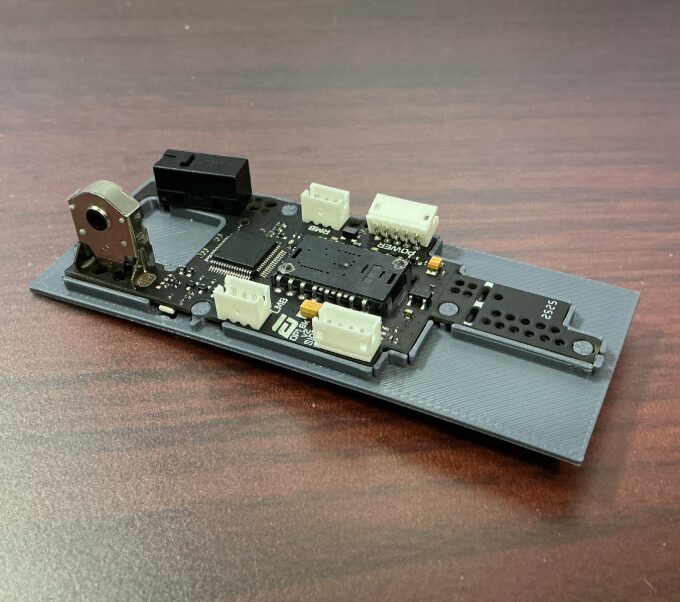
使用感としては、まあ実用はできるかなという感じです。ちょこちょこブラッシュアップと微調整は必要だけどキリもない。
重さは37gで、背が低い都合上やや基板前目に配置したので重心がoptical centerではあるのですが使うとフロントです。これ系の宿命ではあると思うのですが前に寄っちゃいますね。
クリック感はまあ悪くない、微調整振るのも大変なのでそのうち黄金比を見つけたい。粘りと詰まりが一体型らしくありますがkinzuの外形上どうにもならなそう。するとセパレートだなと思ってしまいますね。別に一体型にこだわりがあるわけではないのですけれど。ホイール低い問題。高くするには大きいホイールを作ることですがそれだけだと、結局基板に当たるのでちょっとしか大きくできないです。で、ホイール自体ジャンパして別基板にしようと思います。proxみたいなイメージ。これだとフロント重心問題も多少良くなります。
元の基板がホイール側にねじ止め部が無く固定されていないので、ホイールクリックにばね感が出ているのも気になるのでそれで解消したいところです。
その上でホイールも自作して、サイズも高さも可変にしたいですね。とりあえず折れない軸作ろうかなあ別基板の話だとメインクリックも別基板を起こしたいです。gxスイッチしか使えないので。でホットスワップにしようと思っても純正のスイッチパック売ってないのですよね。なのでホットスワップとかの互換基板作りたい。で、今回マイクロスイッチが邪魔でサポート必要だったので、スイッチとねじ穴の間隔を広げたパターンも作りたいですよね。
ブッシュでかくて小型マウス作れない問題。別基板の話でも必要ですが、zhコネクタ周り買って、op18kv2用のケーブル作ってみました。AWG32の線材で普通に作りやすかったです。AWG36もやってみたのですが、細用のコンタクトが流通してないみたいで、普通のコンタクトだと噛まなくて駄目でした。純正じゃなくて中華のzhコネクタパック買って使ったのですがそれもよくなかったかな。
自作ケーブルに対応させたらさせたで純正が使えなくなってしまうという話はあるのだが
圧着工具はiwissの3220mというやつを買ってみました。2か所一気に圧着できるのはいいのですが、どこまで突っ込んだのか見えないのがちょっと難点に思いました。圧着自体は普通にできました。

アイウィス(IWISS) JSTコネクタ用圧着ペンチ ラチェット式 オープンバレル 0.03-0.5mm2 極小端子対応 IWS-3220Mシェルとしてはこの構造で他の形状を色々作ってみてもいいし、Mbセパレートにしたりボトムシェル追加したりしてもいいのですがどうしようかしら
とはいえメインスイッチ基板が分離している以上は、トップシェルに固定する以外の選択肢はないですよね。ボトムシェルの留め具合でクリック感変わるのは終わっているので。kpuとかza13とかで地獄を見ました。
どちらにせよホイール低いと駄目なので分離基板作るところからですね。今回はサイドボタン付けなかったですが、つまみ持ちならなおのこと使わないのでサイドボタンはサイドよりもトップとかにつけた方が有用なのですよね。
まだまだop18kv2が味しそうです。巷ではten airとかもよさげですが、無線なのでどうかなあというところもあり。でも値段変わんねえんだよな!op18kv2たけえ
ひとまずfdmでop18kv2 mod触ってみたということで。つぎはぎのめちゃくちゃデータ置いておきます。
————-
追記
根本的な問題であるところにカットライン入れたらクリック感めちゃ良くなった。ブレが出るんだけども。
-
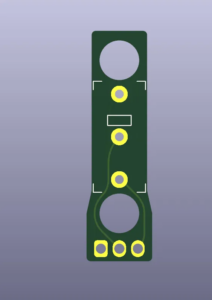
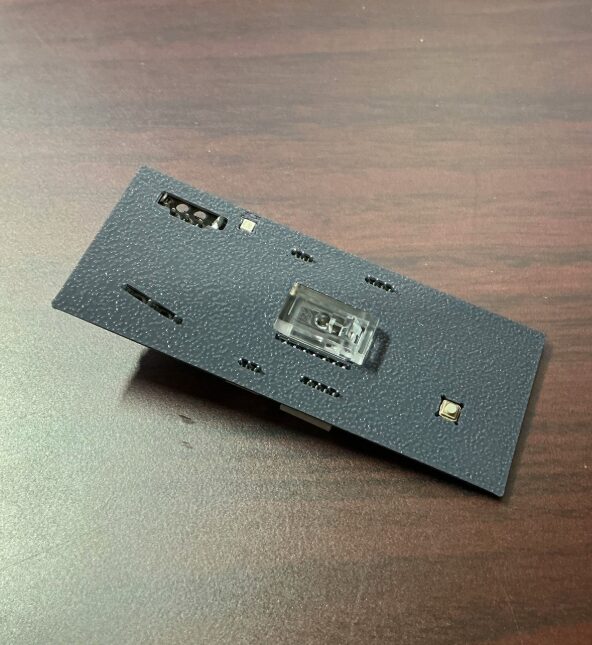
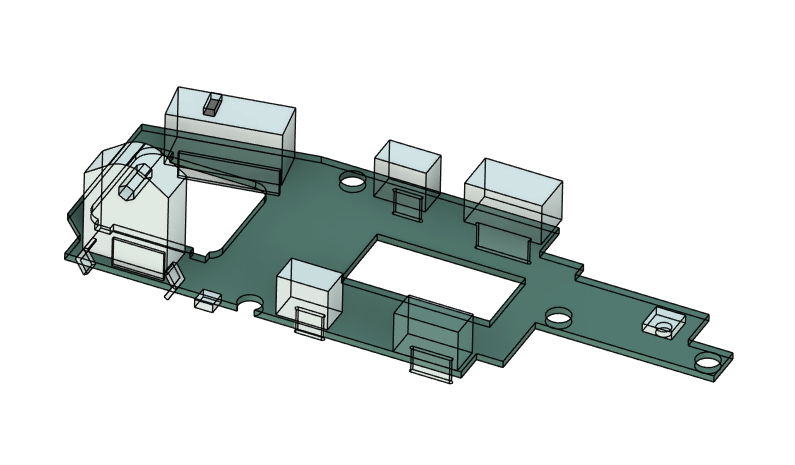
[自作マウス]op1 8k v2 基板採寸
endgame gearのop1 8k v2の基板を3dモデルに起こします。細くて使うのやめてしまったのでマウスMOD素材にしたいと思います。
Endgame Gear OP1 8K V2 マウス紹介基板の採寸はどうするのが簡単で正確なのかとかは知らないので、だらだらと印刷して修正してで合わせました。
センサーのレンズを中心として書きました。op18kv2はコンパクトなタイプのレンズです。datasheetに従ってそのまま書きました。
レンズを忠実に再現するというよりはレンズモデルを引き算すればセンサー周りのボトムシェルが完成するようにしています。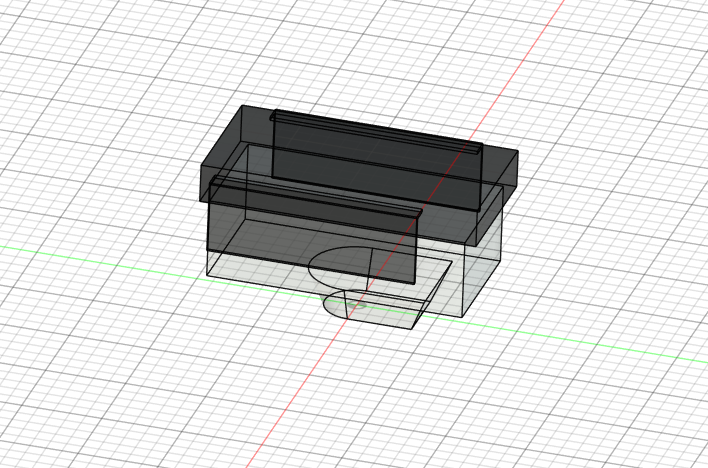
使うことがないような、センサー下の箇所も一応書きました。レンズ外形のガイドと、テーパー状になっている開口部分が引かれています。
センサー下のソール、見栄え的には合ってもいい気がするけどそれだけで売ってたりするのかしら。すると汎用ソールより何かしらのマウス用のソールセットに合わせるのはいいのかもしれない。貼るなら。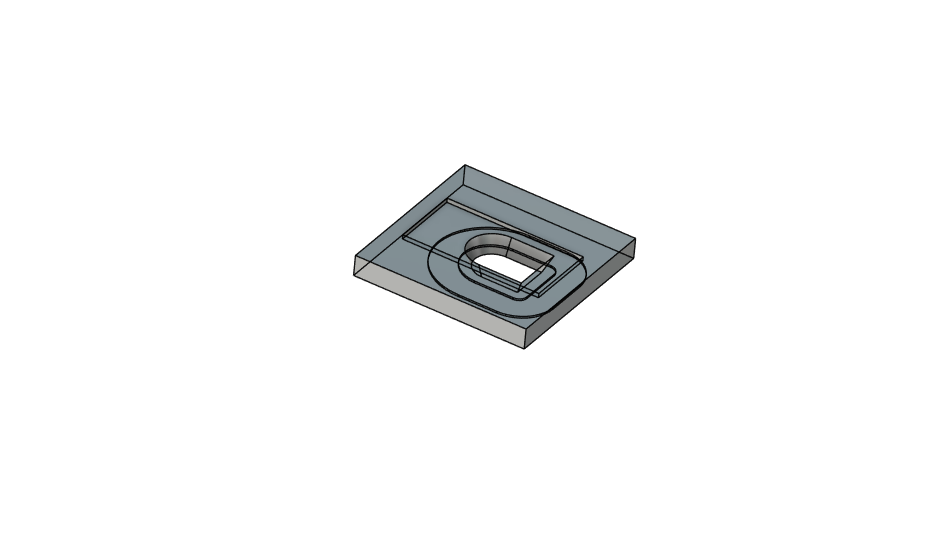
メイン基板のねじ止め位置を決めます。レンズの部分を抜いておき、基準としています。
メイン基板は0.8mm厚です。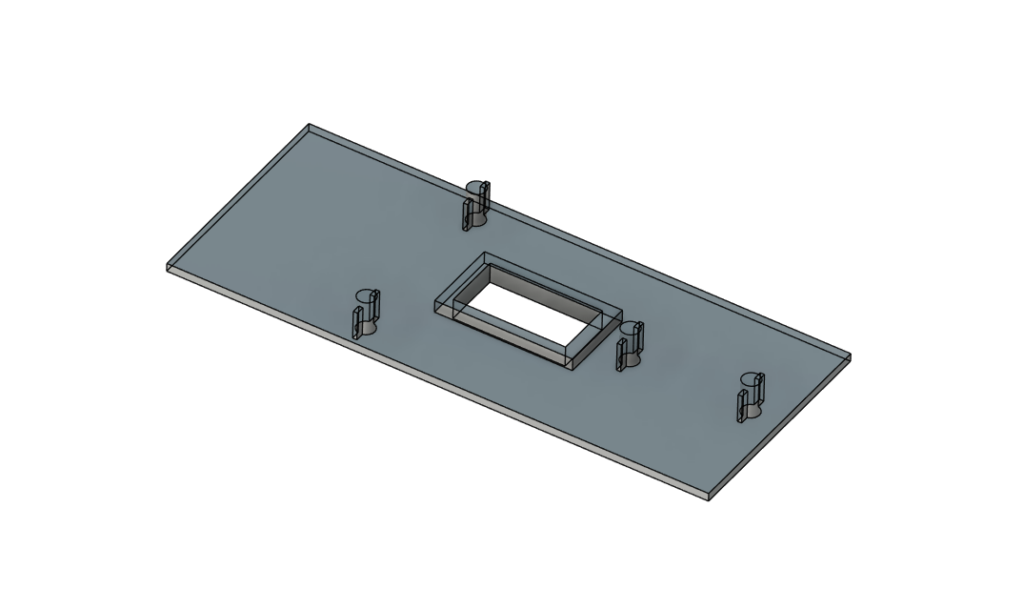
採寸はbambulabのa1miniで印刷して合わせています。
作成したガイドモデルを0.1mmオフセットしたときに基板と印刷したガイドがぴったり合うようにしています、ので実寸モデルというより-0.1mmしたモデルをa1miniで印刷したときにピッタリなモデルという方が正しいです。
テキトウに辺りをつけて印刷、ずれていたら印刷を数十分のサイクルで回します。a1mini様様ですねじ穴位置を合わせた。やっていて驚きましたが、この左右のねじ位置、左右対称じゃないのですね。
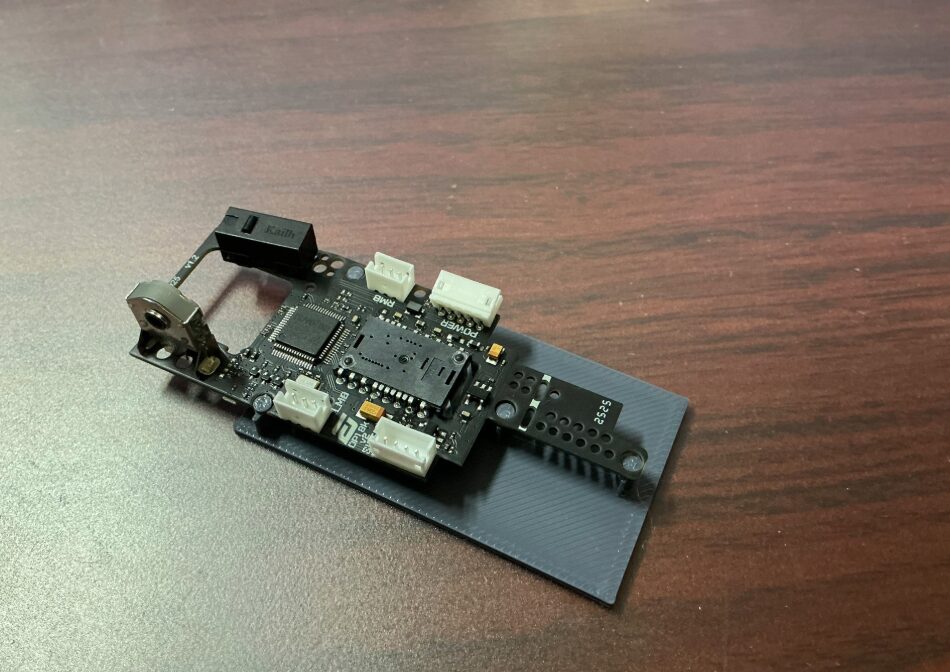
メーカー自らmod推奨している基板なので使いやすいのかなと思っていたのですがそういうわけではなさそうです。
数値は私の合わせた値ですが、左の穴の方が遠いです。実装部品が邪魔でとかなのでしょうけど、そこは合わせてくれよと思ったり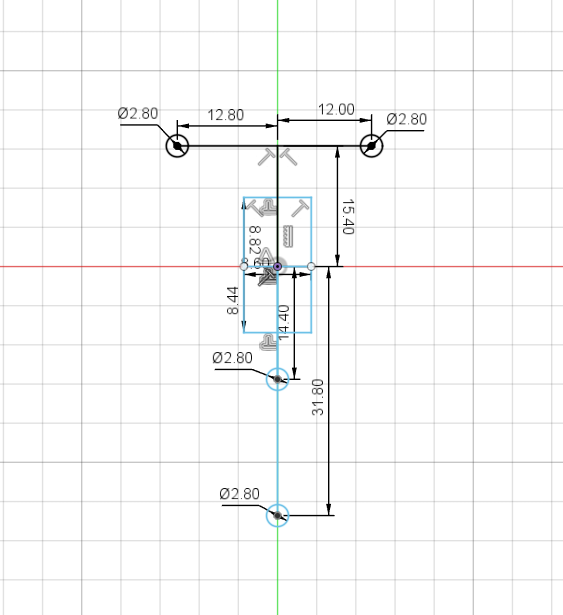
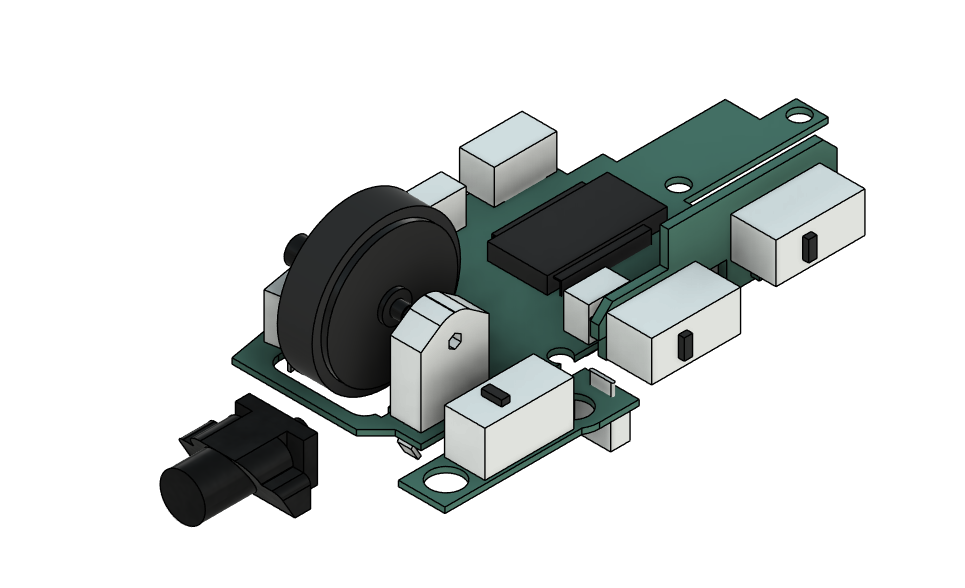
次にホイール下のところを取りました。
ホイールの軸受けのribを通すための凹みが3か所あり歪な形をしています。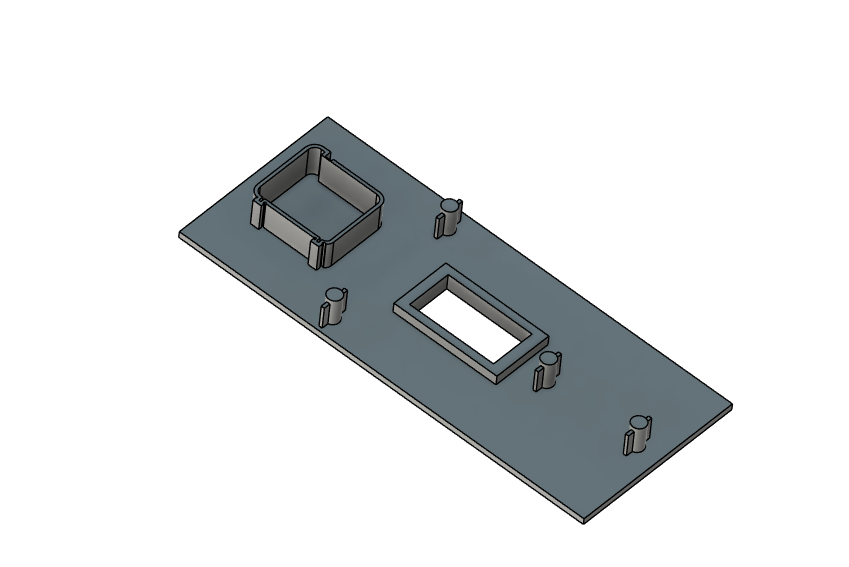
内側の線は取れたので外形を取ります。軽量化のためでしょうがこれまた歪な形をしています。
裏面に実装されているDPIのLEDは若干はみ出しています。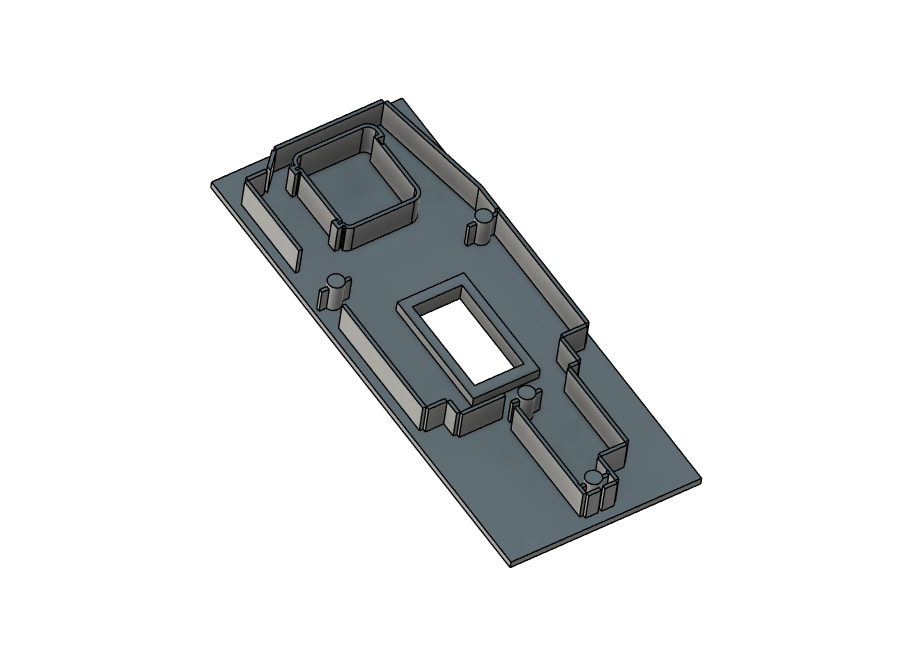
板ができました。
基板後ろのしっぽ部分はDPI切り替えボタンのために生えていて、使わなければカットしてよりこんぱくとにできますというか作例見ていると白いシルクのところでカットしているものしか見ないですね。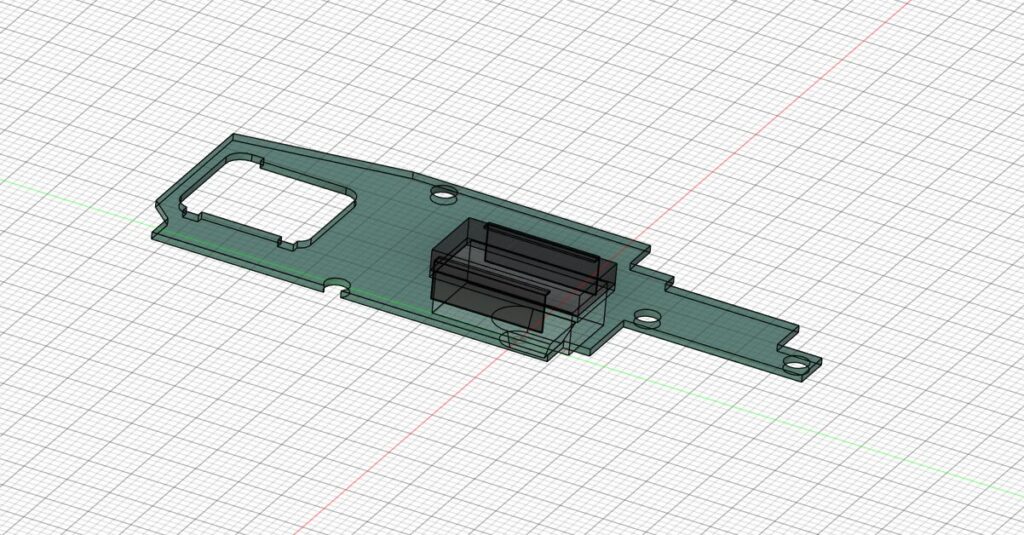
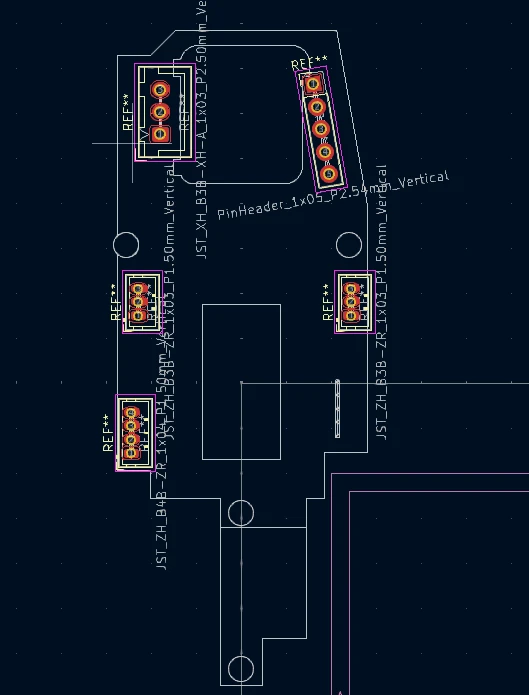
裏面から部品を合わせました。裏面にはコネクタの足、エンコーダとマイクロスイッチの足、DPIのLEDとスイッチがあります。
裏面から合わせればエンコーダとマイクロスイッチも大体合わせられます。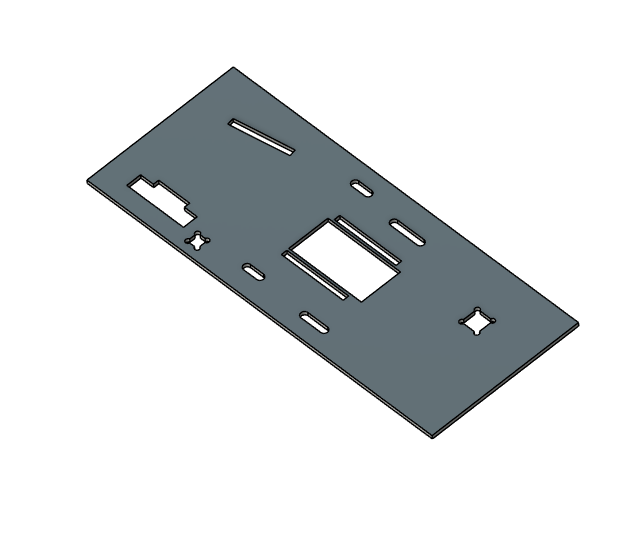
さっき作った基板外形と合わせて基板にべったりの状態にしました。
合わせて部品を追加しました。コネクタでスイッチとusbを引き出しているメリットを生かせない構造も多いと思うのでそういう時はコネクタ下に張り付けるように基板起こして一体型基板にしてtypeC化するのもありかなとか思ってコネクタ位置も取っておきました。
ホイールを追加し、エンコーダとスイッチの前後位置を微調整します。これズレると回していて異音が鳴るのでちゃんとします。op18kv2自体はそこまで固定されていないのかたまに異音が鳴ることがありました。
ホイールの固定は各社いろいろしていますが、op18kv2はシンプルに軸とホイールの間に一段保持のための段差が両側にあり、ここを軸受けに彫りがありぴったり挟み込み受けている感じです。3dp製では彫りを出すのは精度がむりなので軸受けでできるだけぴったり挟むぐらいでしょうか。
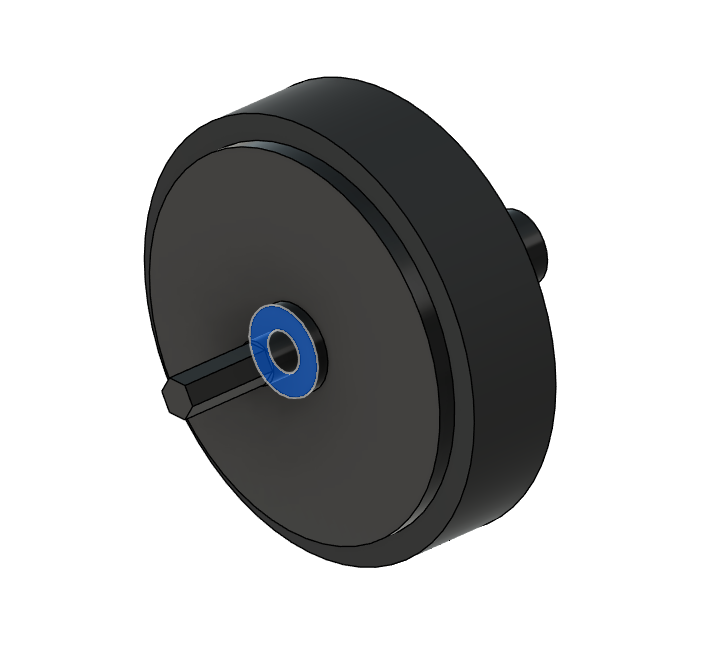
メインスイッチ、サイドスイッチ、ブッシュも取りました。メインスイッチの基板は0.8mm、サイドスイッチの基板は1.2mmでした。
ブッシュは取ったけどこのケーブルケーブル自体の取り回しはちょうどいいがブッシュ回りがごついの好かないんだよな。ケーブルは自作したのを使いたい感じ。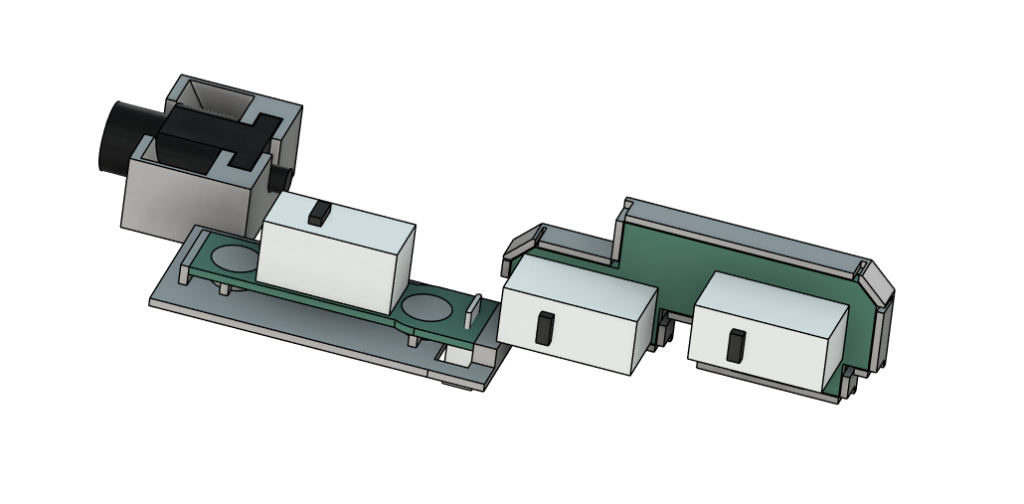
まあネジ穴とホイール位置だけあってればいいかなというところはあるので他は雑な感じで
何か自作マウスに取り組みたいところですが、割と基板起こすだけで満足してしまった。
MJFプリントを中華に投げるのが時間とか金とか精度とか物性とかちょっと嫌になってはいたのでFDMでの印刷に向いた感じで作りたいなと思ったり。すると嵌め合うよりワンピースのほうがいいなと思うのですがするとop18kv2のセパレートを若干生かしづらい気もしたり。
有線マウス積極的に出してるのがeggだけな以上、自分で基板起こす以外はop18kv2だけで遊べるのかなと思うんで遊びたいですね。
スイッチパックも公式で売り出していますがどうなんでしょうね。高速応答を謳っているならホットスワップでなく接点は接合しておきたい気もするけどそれを言うとコネクタ接続ではあるのだよな。gxスイッチのやつはずっと売り切れだしGXスイッチ単品もアリエクとかで売っているのを見ないが探せばあるのだろうか。使う人いたらデータ置いておきます。書いてますが実寸でなくウチのa1mini-0.1mm合わせです。




![[自作マウス]op18kv2 mod①FDMで様子見てみる](https://tsuiha.com/wp-content/uploads/2026/01/image-15-6.jpg)
![[自キ]BNY6X V2 ②GH60互換60%キーボード試作品届いた](https://tsuiha.com/wp-content/uploads/2025/11/IMG_3788.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る④Nitingale B2](https://tsuiha.com/wp-content/uploads/2025/11/IMG_3549.jpg)
![[BF6]視野角と感度の設定について](https://tsuiha.com/wp-content/uploads/2025/10/image-36-3.jpg)
![[自キ]BNY6X V2 ①GH60互換60%キーボード設計する](https://tsuiha.com/wp-content/uploads/2025/10/image-6.png)
![[自キ]KS-33B Gateron LowProfile 3.0スイッチに希望はあるのか](https://tsuiha.com/wp-content/uploads/2025/09/IMG_3528.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る③修正](https://tsuiha.com/wp-content/uploads/2025/09/image-2.png)
![[自キ]チルトテントアルミケースな左手デバイス作る②ケース](https://tsuiha.com/wp-content/uploads/2025/08/image-26.jpg)
![[自キ]チルトテントアルミケースな左手デバイス作る①基板](https://tsuiha.com/wp-content/uploads/2025/08/image-24.jpg)

![[自キ]遊舎工房のレーザー加工サービス利用してみた](https://tsuiha.com/wp-content/uploads/2025/08/image-5-1.jpg)


![[自キ]磁気キーボードを作りたい。6週目](https://tsuiha.com/wp-content/uploads/2025/07/image-2.jpg)
![[自キ]磁気キーボードを作りたい。5週目](https://tsuiha.com/wp-content/uploads/2025/06/image-27.jpg)
![[自キ]磁気キーボードを作りたい。3週目](https://tsuiha.com/wp-content/uploads/2025/05/image-15-1.jpg)
![[自キ]磁気キーボードを作りたい。2週目](https://tsuiha.com/wp-content/uploads/2025/05/image-9.jpg)
![[自キ]磁気キーボードを作りたい。1週目](https://tsuiha.com/wp-content/uploads/2025/04/image-25-1.jpg)
![[自キ]50%オーソリニアのキーボード作った OSPREY59O](https://tsuiha.com/wp-content/uploads/2025/03/IMG_2343.jpg)





![[自作マウス]haste2基板を3Dモデルに起こした](https://tsuiha.com/wp-content/uploads/2025/01/image-10.jpg)

![[デスク]VESA拡張してモニターを増設した](https://tsuiha.com/wp-content/uploads/2025/01/IMG_2567.jpg)
![[デスク]充電ケーブルを天板裏に移動してすっきりした](https://tsuiha.com/wp-content/uploads/2025/01/IMG_2565.jpg)

![[自作マウス]マウスシェルモデリング その2](https://tsuiha.com/wp-content/uploads/2024/11/IMG_2288.jpg)

![[イヤホン]moondrop 水月雨 KadenzとKatoの雑話](https://tsuiha.com/wp-content/uploads/2024/11/IMG_2385.jpg)

![[オーディオ]ジェネリックER-4B化モジュールを作る②](https://tsuiha.com/wp-content/uploads/2024/08/er4switch1.jpg)
a